Vention Expands Software-Defined Robotics with FANUC and UR
Vention’s collaboration with FANUC and Universal Robots extends software-defined automation from cobots to industrial robots, with implications for welding cell integrators.
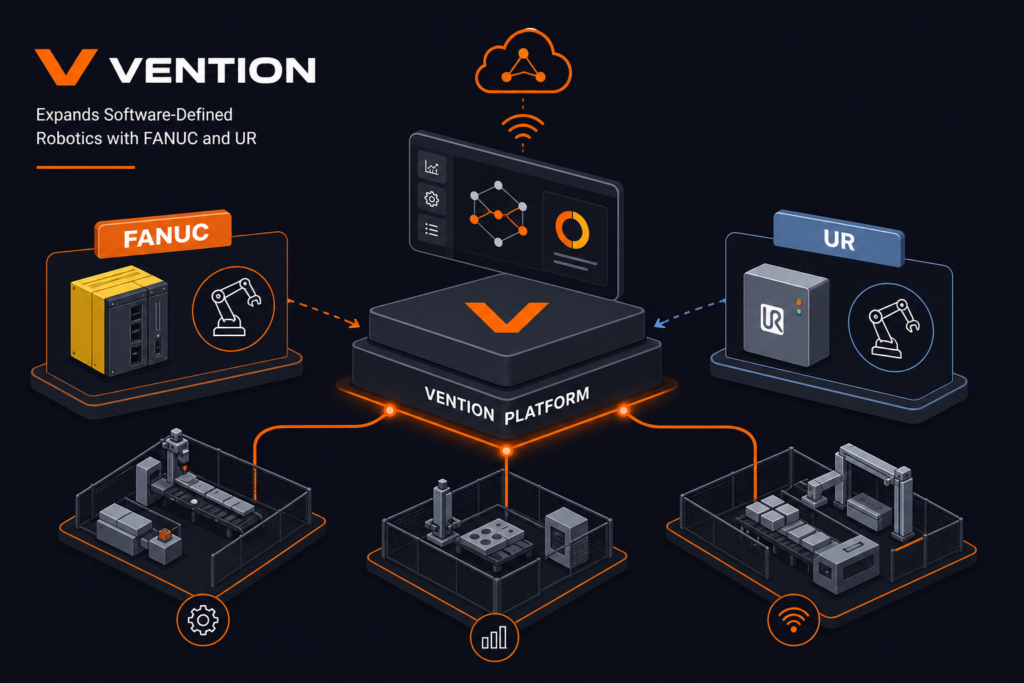
Vention is extending its software-defined automation model through collaborations with FANUC and Universal Robots, aiming to reduce the effort required to design, simulate, deploy, and operate robotic systems from a single digital environment. Reported by The Robot Report, the move broadens Vention’s reach from collaborative robot applications into heavier industrial automation while keeping a common workflow for manufacturers and system integrators. For production teams under pressure to automate faster, the significance is less about one more robot partnership and more about the gradual standardisation of engineering tasks that have traditionally been fragmented across CAD, offline programming, controls integration, and commissioning.
The practical value of that approach is clear in mixed automation environments. Many factories now evaluate both collaborative robots and conventional industrial robots for the same process family, depending on payload, reach, takt time, guarding strategy, and floor space. A platform that supports Universal Robots for collaborative deployments and FANUC for industrial robot applications can shorten the path from concept to executable cell design. According to Newswire, the FANUC collaboration expands Vention’s platform from collaborative robotics to industrial robot applications, with a unified environment for design, programming, simulation, deployment, and operation. That matters for manufacturers that want to compare automation scenarios without rebuilding the engineering stack each time they switch robot class or vendor.
From cobot-first tools to broader industrial robot support
Software-defined automation has become a useful term because it reflects a shift away from hardware-led integration toward reusable digital workflows. Instead of starting with a robot controller and building the project around vendor-specific tools, users increasingly expect a higher-level environment where mechanical design, application templates, motion planning, and commissioning data are connected. Vention’s model fits that trend, and its extension to FANUC suggests that the company is targeting larger and more demanding use cases, including machine tending, palletizing, material handling, and welding. Engineering.com reported that the platform can generate collision-free motion paths and provide integrated monitoring and remote support, features that directly address common deployment bottlenecks for integrators.
For buyers and engineering managers, the broader implication is vendor interoperability at the planning stage rather than complete hardware neutrality in the field. FANUC and Universal Robots are central to this announcement, but the market context includes ABB, KUKA, Yaskawa, and Doosan, all of which compete in adjacent automation segments. Integrators rarely standardise on a single robot brand across every project; instead, they need workflows that can absorb different kinematics, safety architectures, and controller ecosystems. A software layer that reduces engineering repetition can therefore improve quoting accuracy, shorten feasibility studies, and make smaller projects economically viable. That is particularly relevant for metal fabrication SMEs that may not have in-house robotics specialists but still need repeatable deployment methods.
Why this matters for welding and fabricated metal production
Welding is one of the more demanding tests of any software-defined automation platform because it combines robot path quality, fixture repeatability, process equipment integration, and safety compliance. A digital environment can simplify the early stages of welding cell development by helping engineers place the robot, positioners, guarding, and part fixtures before hardware arrives on site. In collaborative welding, where Universal Robots systems are often paired with compact cells, the ability to standardise templates and simulate reach can reduce commissioning time. In heavier arc welding or multi-station applications, FANUC’s industrial robot portfolio is more likely to be selected for payload, duty cycle, and reach. The value of a common design layer is that it lets manufacturers compare these options with less engineering overhead.
Standards remain a limiting factor and a necessary discipline. Integrators still need to validate cell safety and machine interfaces against applicable requirements such as ISO 10218 for industrial robot safety, ISO/TS 15066 for collaborative operation, and relevant IEC and EN electrical and machinery standards, including EN ISO 13849 for safety-related control systems where applicable. Software can accelerate layout and programming, but it does not remove the need for risk assessment, safe speed and separation monitoring where collaborative modes are used, or proper segregation when arc welding hazards are present. For welding cells, fume extraction, arc flash shielding, grounding, torch cleaning, wire management, and power source communication remain application-specific engineering tasks that no generic platform fully automates.
What this means for welding cell integrators
For robotic welding cell integrators, the main opportunity is not simply faster robot programming; it is a more standardised front end for cell design and customer engagement. If a platform can help generate layouts, estimate reachability, simulate motion, and package documentation earlier in the sales cycle, integrators can respond to RFQs with less non-recurring engineering time. That is useful when evaluating whether a cobot welding cell based on Universal Robots or Doosan is sufficient, or whether a conventional industrial robot from FANUC, ABB, KUKA, or Yaskawa is required for throughput and duty cycle. In practice, this could improve project selection, reduce late-stage redesign, and support modular cell architectures where weld tables, positioners, and guarding are reused across multiple installations.
There is also a competitive angle for system integrators serving Tier-1 automotive suppliers and general metalworking firms. Customers increasingly expect digital proof before purchase: simulated cycle times, visualised access for operators, and clearer evidence that a cell can be expanded later. A software-defined approach can support that expectation, especially when paired with modular hardware and remote support capabilities. The likely result is not the elimination of custom integration, but a shift in where value is created. Less time may be spent on repetitive setup work, and more on process optimisation, weld quality validation, and integration with MES, traceability, and plant maintenance systems.
Manufacturers assessing new robotic welding cells, cobot welding stations, or modular automation projects may want to review how software-defined design tools affect deployment time, safety validation, and future scalability. For companies comparing FANUC, Universal Robots, ABB, KUKA, Yaskawa, or Doosan-based solutions, requesting a technical quote can help clarify the most suitable cell architecture for the process, footprint, and production volume.
Related articles
Request a quote
Looking for a specific configuration, or want to discuss our current stock? Tell us about your project — we reply within 24 hours from our Bilbao office.