NeoEyes NE503 Adds Edge AI Vision for Welding Automation
CamThink’s NeoEyes NE503 brings 20 TOPS of on-device AI and 4K vision to industrial inspection, with potential gains for 3D guidance, weld quality control, and low-latency automation.
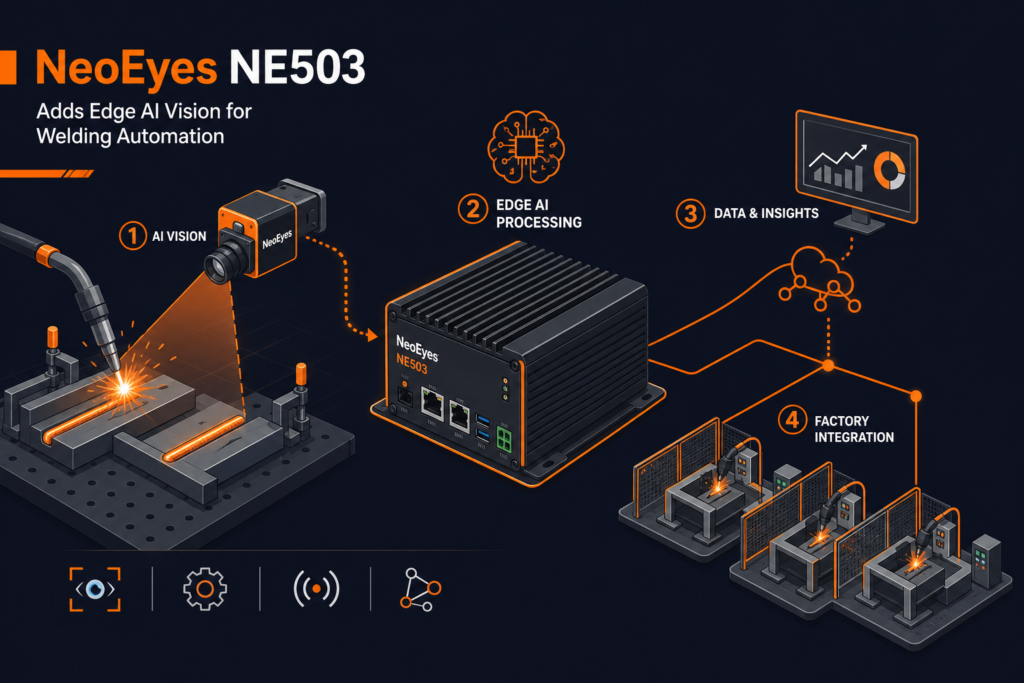
CamThink’s new NeoEyes NE503 edge AI camera points to a broader shift in machine vision for industrial automation: more processing is moving directly onto the camera, reducing reliance on external PCs and cloud links for inference. Reported by Hackster.io, the device combines 20 TOPS of on-device AI compute with a 4K imaging platform intended for programmable industrial vision tasks. For manufacturers evaluating vision upgrades, the significance is less about headline compute alone and more about what local inference can enable on the line: lower latency, simpler architectures, and faster response for inspection and robot guidance. In welding environments, where spatter, heat distortion, reflective surfaces, and variable part fit-up can challenge conventional imaging, that combination may be particularly relevant for seam finding, part presence checks, and post-weld quality verification.
Edge inference moves closer to the process
According to Hackster.io, the NE503 is designed to run vision models directly on the device rather than streaming all image data to a separate industrial computer. Additional product details published by CamThink describe it as an open 4K edge AI camera platform with containerized applications, Power over Ethernet, and system integration features. That architecture matters in production cells because it can reduce network traffic and avoid the delays that come with sending high-resolution image streams to a central processor for every decision. In practical terms, an edge AI camera can classify a weld bead, detect a missing component, or verify fixture loading locally, then send only the result or exception to the PLC, robot controller, or MES layer.
The broader industrial relevance is that programmable cameras are increasingly expected to support multiple workloads rather than a single fixed inspection routine. A secondary report from geekfence.com notes support for tasks such as object detection, OCR, pose estimation, and behavior analysis, alongside an embedded Linux environment, Python SDK, REST API, and remote access options. For system integrators, that suggests a platform approach rather than a closed smart sensor. In mixed-model manufacturing, where one cell may need to identify variant parts, read traceability marks, and confirm weld completion within the same takt time, flexibility at the camera layer can reduce the number of separate devices required.
Why 3D-capable AI vision matters in welding
The editorial angle around the NE503 is its potential to strengthen AI-powered 3D vision in industrial settings. While the available source material emphasizes edge AI and 4K imaging more than a specific 3D sensor modality, the processing headroom is relevant to 3D vision pipelines that combine image analysis, depth estimation, feature extraction, and decision logic. In robotic welding, advanced vision is increasingly used before, during, and after the arc. Before welding, it can support bin-picked or fixture-loaded part localization, gap and mismatch measurement, and adaptive path generation. During welding, it can help track seam position or detect deviations caused by thermal movement. After welding, it can inspect bead geometry, detect underfill or excessive reinforcement, and verify that the correct joint has been completed.
These use cases are especially relevant in sectors such as automotive Tier 1, fabricated metal products, and contract manufacturing, where product mix and quality documentation requirements continue to rise. Major robot vendors including ABB, KUKA, FANUC, Yaskawa, Universal Robots, and Doosan already support vision-guided automation through their own ecosystems or third-party interfaces. What changes with more capable edge cameras is the possibility of pushing more intelligence into a compact device at the point of sensing. That can simplify deployment in smaller cells or cobot workstations where cabinet space, wiring complexity, and commissioning time are constrained. For SMEs in particular, reducing the need for a dedicated vision PC may lower integration overhead, provided the camera platform remains maintainable and interoperable.
Integration, standards, and deployment considerations
For production engineers, the technical evaluation should go beyond AI performance figures. A camera intended for industrial use must fit into established control and safety architectures, support deterministic communication where needed, and tolerate harsh operating conditions. In welding cells, that includes resistance to vibration, electromagnetic noise, fumes, and changing illumination. Integrators will also look for compatibility with industrial protocols, trigger synchronization, and secure software lifecycle management. Where the camera influences robot motion or quality release decisions, compliance with relevant standards becomes part of the discussion, including IEC and EN electrical and machinery frameworks, as well as ISO standards used in robot integration and functional safety assessments. Depending on the application, that may include ISO 10218 for industrial robot safety, ISO/TS 15066 for collaborative operation, and EN/IEC requirements applied through the machine’s overall CE conformity process.
Another practical issue is model governance. Edge AI can reduce latency, but manufacturers still need a process for dataset management, version control, validation, and requalification when parts, materials, or weld procedures change. Weld inspection models trained on one joint type or surface finish may not generalize across all assemblies. For that reason, open deployment environments and APIs can be an advantage, but only if they are matched by disciplined commissioning and maintenance practices. The NE503’s open software positioning may appeal to integrators that want to build custom applications, yet end users will still need clear ownership of cybersecurity, backup, and long-term support.
What this means for welding cell integrators
For robotic welding and cobot welding projects, the NE503 highlights a direction that is likely to influence future welding cell design: more distributed intelligence at the sensor level. Integrators building cells around ABB, KUKA, FANUC, Yaskawa, Universal Robots, or Doosan platforms may see value in edge AI cameras for pre-weld part verification, adaptive fixturing checks, torch approach confirmation, and post-weld inspection without adding a full industrial PC to every station. In high-volume cells, that can support faster cycle decisions and reduced network load. In flexible low-volume cells, it can help manage part variation and shorten changeovers. The real benefit will depend on how well the camera integrates with robot programming, PLC logic, HMI workflows, and traceability systems, but the direction is clear: vision is becoming more autonomous, more software-defined, and more relevant to weld quality assurance.
Manufacturers and integrators assessing AI vision for robotic welding, cobot welding, or automated inspection can use developments like the NE503 as a benchmark for future-ready cell architecture. For support in specifying a welding cell with integrated vision, safety, and robot compatibility, readers can request a quote for a tailored solution.
Related articles
Request a quote
Looking for a specific configuration, or want to discuss our current stock? Tell us about your project — we reply within 24 hours from our Bilbao office.