RF Connectors Become Critical in Robotic Inspection Systems
RF connectors are emerging as a reliability bottleneck in robotic vision, sensor communication and automated inspection, with direct implications for welding cells.
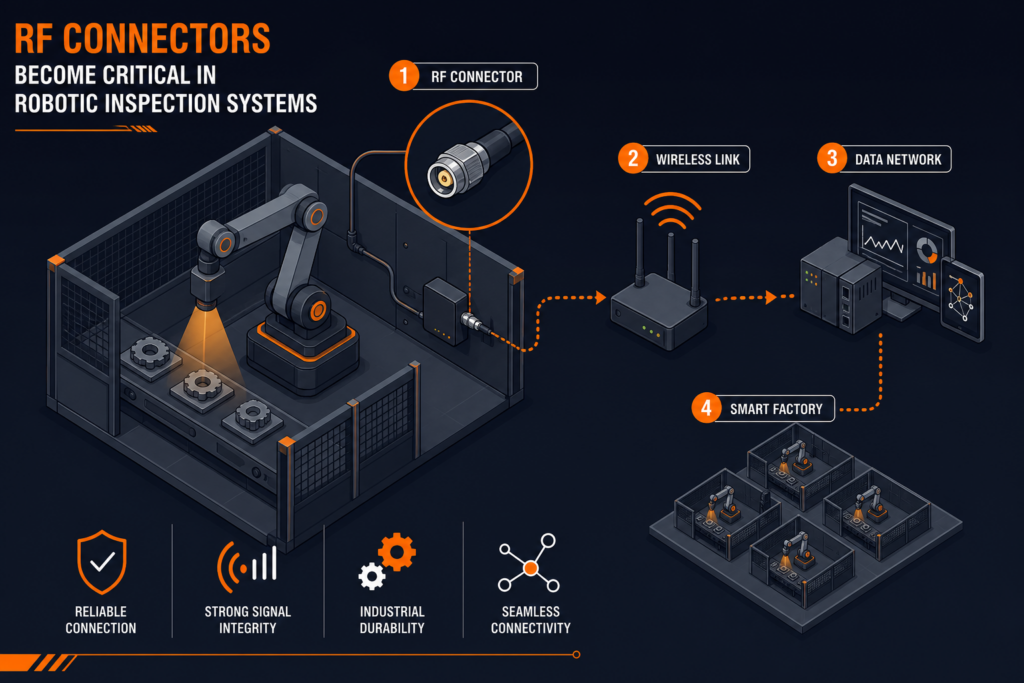
RF connectors are rarely the first component discussed when manufacturers evaluate robotic vision, automated inspection or sensor-driven process control. Attention usually goes to cameras, AI models, edge processors and robot software. Yet the physical signal path remains a limiting factor in real production environments, especially where vibration, electromagnetic noise, cable motion and thermal cycling are routine. A recent article in Robotics & Automation News argued that robotic inspection systems cannot compensate in software for unstable high-frequency connections, and that point is highly relevant for factories deploying industrial robots and cobots alongside machine vision and in-process sensing. In automated manufacturing, a degraded connector can affect image timing, sensor accuracy and communication determinism long before a fault becomes visible at the HMI.
Signal integrity is becoming a production issue, not just a component issue
Modern robotic cells increasingly combine high-resolution cameras, laser profilers, seam tracking sensors, radar, wireless modules and distributed I/O. These devices depend on stable transmission of high-frequency signals and low-noise power and data interfaces. In practice, connectors are exposed to repeated flexing on dress packs, torsion at robot wrists, coolant mist, weld spatter, dust and micro-vibrations from servo motion. Over time, those conditions can loosen mating interfaces, change impedance characteristics or increase insertion loss. The result may be intermittent packet errors, timing jitter or noisy sensor outputs that are difficult to diagnose because they resemble software or calibration problems. Industry guidance from Richardson RFPD highlights that EMI filter connectors are used to protect robotic control systems from RF interference and preserve accurate, safe operation. That matters in production lines where welding power sources, variable-frequency drives and servo systems create a dense electromagnetic environment.
The issue is broader than classic RF coaxial applications. In robotics, interconnect design now sits at the boundary between OT reliability and data-centric manufacturing. Molex notes that industrial robotics connectors and sensors must support collaborative operation, IT/OT integration and demanding automation conditions. For production managers, that translates into a practical requirement: connectors should be specified as part of system architecture, not treated as generic accessories. Shielding effectiveness, locking mechanisms, ingress protection, mating cycle life and cable strain relief all influence uptime in the same way as controller redundancy or safety PLC design.
Why automated inspection depends on connector reliability
Automated inspection systems convert optical, electrical or positional signals into pass/fail decisions that can stop a line, reject a part or trigger rework. In those applications, small signal degradations can have disproportionate consequences. A vision camera with a noisy clock or unstable synchronization path may produce inconsistent edge detection. A laser measurement head with intermittent communication may create false dimensional deviations. A wireless sensor gateway with poor RF continuity may introduce latency that breaks deterministic process monitoring. The original article’s central argument is that these failures are often rooted in the connector interface rather than the sensor itself.
This is particularly relevant in metal fabrication and automotive Tier-1 production, where inspection systems are increasingly integrated directly into robotic handling and welding cells. Research on robotic arc welding sensors published by Springer Nature describes seam-finding and real-time seam-tracking systems interfacing with robot controllers from leading manufacturers. Such sensors only deliver value when communication remains stable throughout motion and during arc exposure. In a plant using ABB, KUKA, FANUC or Yaskawa robots, a seam tracker, through-arc sensor or post-weld inspection camera may be mechanically robust, but if the connector system is not matched to the robot’s dynamic cable routing and EMI conditions, process capability can drift. The same applies to collaborative applications using Universal Robots or Doosan cobots, where compact end-of-arm tooling often forces tighter cable bends and more frequent reconfiguration.
Standards and design choices that shape connector performance
For integrators and OEMs, connector selection increasingly intersects with compliance and machine design standards. While RF connector standards are component-specific, the wider robotic cell must still meet machinery, electrical and safety requirements under frameworks such as IEC, ISO and EN. Depending on the installation, relevant references may include ISO 10218 for industrial robot safety, ISO/TS 15066 for collaborative operation, IEC 60204-1 for electrical equipment of machines and EN-based EMC requirements applied in the European market. These standards do not prescribe a single connector family, but they reinforce the need for reliable electrical continuity, EMC control, secure routing and maintainability.
From an engineering standpoint, several design choices stand out. First, impedance-controlled connectors and cables should be matched to the sensor or camera interface to avoid reflections and signal loss. Second, positive locking and anti-vibration retention are essential on moving axes. Third, shielding termination must be designed as a system, including cabinet entry, grounding strategy and separation from high-current welding cables. Fourth, environmental sealing should reflect the actual duty cycle, including spatter exposure, washdown or abrasive dust. Finally, maintenance access matters: a connector that is difficult to inspect or replace inside a compact wrist assembly can extend downtime during troubleshooting. These factors are increasingly relevant as factories deploy more data-intensive sensing at the edge.
What this means for welding cell integrators
For robotic welding cell integrators, RF and high-frequency connector reliability should be treated as part of weld quality assurance, not merely as an electrical detail. Vision-guided part location, laser seam tracking, through-process monitoring and automated post-weld inspection all depend on clean, repeatable signal transmission. In arc welding cells, EMI from the welding process can couple into poorly shielded or poorly terminated interconnects, affecting cameras, sensors and communication modules. In cobot welding, where flexible deployment is valued, repeated redeployment can increase wear on connectors and cable assemblies. Integrators designing cells around ABB, KUKA, FANUC, Yaskawa, Universal Robots or Doosan platforms should therefore review connector retention, dress-pack routing, shielding continuity and service intervals during the concept phase. That approach can reduce nuisance faults, improve inspection repeatability and support more stable cycle times in automated welding and inspection workflows.
As manufacturers push for higher traceability and more autonomous quality control, the reliability of the physical interconnect layer is likely to receive more scrutiny from procurement teams and engineering managers. RF connectors may remain a small line item in the bill of materials, but their influence on sensor communication and inspection stability is disproportionate to cost. Companies planning new robotic welding or inspection cells, or retrofitting existing systems with additional vision and sensing, may benefit from reviewing connector architecture alongside robot selection, safety design and process validation.
For manufacturers assessing a new robotic welding cell, cobot welding station or automated inspection upgrade, Robotic Welding Cells can provide a technical review of sensor integration, cable routing and cell design requirements. Readers who want to compare options can request a quote for a tailored solution.
Related articles
Request a quote
Looking for a specific configuration, or want to discuss our current stock? Tell us about your project — we reply within 24 hours from our Bilbao office.