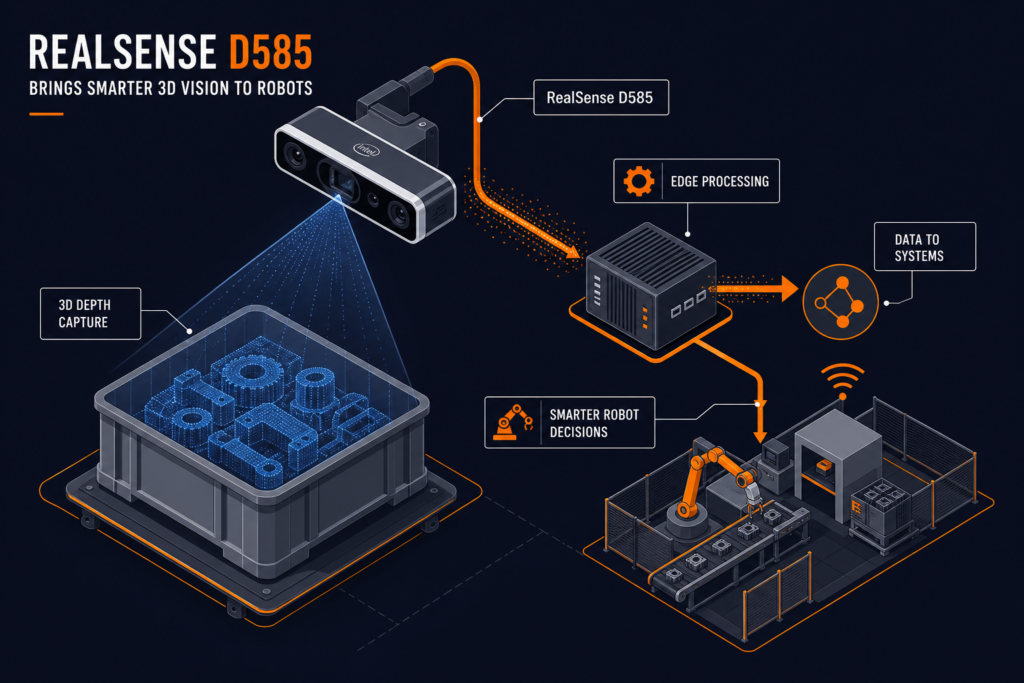
RealSense D585 Brings Smarter 3D Vision to Robots
RealSense’s new D585 depth camera combines on-device AI, 20 m range and close-range sensing, with implications for robotic welding, seam tracking and flexible cell automation.
RealSense D585 expands the role of 3D vision in robotics
RealSense has introduced the D585 depth camera as a new 3D vision platform for robotics, with a specification set that is directly relevant to industrial automation. As first reported by Hackster.io, the device combines depth sensing with on-chip AI processing to reduce the amount of image handling that must be done elsewhere in the system. According to the product information published by RealSense, the camera supports depth measurement from as close as 10 cm, reaches beyond 20 m, operates at up to 60 fps at full resolution, and offers a 120 x 100 degree field of view. For production environments, that combination matters because it addresses two persistent constraints at once: the need to detect parts and edges at short range, and the need to maintain situational awareness across larger work envelopes, conveyors, fixtures or mobile platforms.
From a manufacturing perspective, the D585 is less about consumer-style perception and more about making machine vision easier to deploy in practical robot cells. Integrators often face a trade-off between high-performance 3D sensing and system complexity. If more processing can be executed on the device, the burden on the robot controller, industrial PC or edge computer can be reduced. That can simplify architecture in cells built around ABB, KUKA, FANUC, Yaskawa, Universal Robots or Doosan platforms, especially where vision must coexist with PLC logic, safety devices, weld power sources and HMI functions. In mixed automation lines, a camera that can support object localization, inspection and robot guidance without excessive compute overhead may shorten commissioning time and reduce the number of interfaces that need to be validated.
Why depth quality and edge AI matter on the shop floor
The technical significance of the D585 lies in the way it combines sensing and processing. RealSense positions the product as an AI-native vision platform rather than a simple camera refresh, and the company’s later product communications around the D585 family indicate a broader move toward software-defined perception for robotics. Coverage from The Robot Report highlights the same direction: depth sensing, edge AI acceleration and a platform intended to improve through software capabilities. For industrial users, that approach may support more stable detection under variable lighting, reflective surfaces or changing part presentation, although actual performance will still depend on calibration, mounting, shielding and application tuning.
In welding and metal fabrication, 3D vision remains challenging because the environment is rarely clean or static. Fixtures vary, tack welds distort geometry, and spatter, smoke and arc light can interfere with optical systems. A camera with stronger close-range performance can be useful for pre-weld part finding, gap measurement, bin-picking of blanks, torch approach verification and post-weld inspection. The wider field of view also has practical value in larger cells where a single sensor may need to monitor a table, positioner or handoff zone. However, integrators will still need to evaluate whether the camera is being used before arc ignition, during welding, or after the process, because each phase creates different optical and thermal conditions. In many cases, 3D depth cameras complement rather than replace dedicated laser seam tracking systems.
What this means for welding cell integrators
For robotic welding cell designers, the D585 points to a broader trend: more perception is moving closer to the sensor, and that can change how cells are engineered. In conventional arc welding automation, seam tracking and part localization are often handled by separate subsystems. A 3D camera with onboard processing could support upstream tasks such as part presence detection, fixture verification, orientation checks and adaptive path selection before the robot starts welding. That is particularly relevant in high-mix, low-volume fabrication, where cobot welding and flexible robotic cells are expected to deal with variable part geometry and shorter setup cycles. Integrators working with ABB OmniCore, KUKA KR C5, FANUC R-30iB, Yaskawa Motoman, Universal Robots e-Series or Doosan collaborative platforms may see value in using a common vision layer across loading, handling and weld preparation steps.
There are also standards and compliance considerations. Any vision-guided welding cell must be assessed as a complete machine or assembly, not as a camera in isolation. Depending on the architecture, relevant frameworks can include ISO 10218 for industrial robot safety, ISO/TS 15066 for collaborative applications, IEC 60204-1 for electrical equipment of machines, and EN ISO 13849-1 for safety-related control systems. Where cameras influence robot motion or operator interaction, the distinction between process sensing and safety sensing must remain clear. A depth camera used for guidance does not automatically qualify as a safety-rated protective device. For integrators, that means the D585 may improve perception and adaptability, but it does not remove the need for validated safeguarding, risk assessment and functional safety design.
Implications for flexible automation and procurement
For production managers and procurement teams, the practical question is whether improved 3D vision can reduce downtime, manual touch-up and fixture dependency. In welding operations, better part localization can help compensate for upstream variation in cut parts, formed assemblies or manually loaded jigs. That can translate into fewer robot path offsets, less rework and more stable cycle times, especially when cells are expected to switch between product variants. The D585’s range and frame-rate profile suggest it may also be relevant beyond fixed welding stations, including mobile robots, inspection stations and material handling cells that feed welding lines. The strongest business case is likely to appear where one sensor platform can support multiple tasks across the process chain rather than serving as a single-purpose add-on.
Adoption will still depend on integration effort, software support and robustness in harsh industrial conditions. Buyers will want evidence on repeatability, latency, environmental tolerance and compatibility with existing middleware, robot interfaces and MES or quality systems. For welding applications, they will also ask how the camera behaves around reflective metals, dark surfaces and changing ambient light. Those questions are typical for any new vision component entering production. Yet the D585 shows that 3D sensing is moving toward more compact, more intelligent and more deployable architectures, which is relevant for manufacturers trying to make robotic welding cells more adaptive without overcomplicating controls.
Companies evaluating robotic welding, cobot welding or vision-guided cell upgrades can request a quote to assess how 3D sensing, seam tracking and cell design choices fit their production mix, safety requirements and weld quality targets.
Related articles
Request a quote
Looking for a specific configuration, or want to discuss our current stock? Tell us about your project — we reply within 24 hours from our Bilbao office.