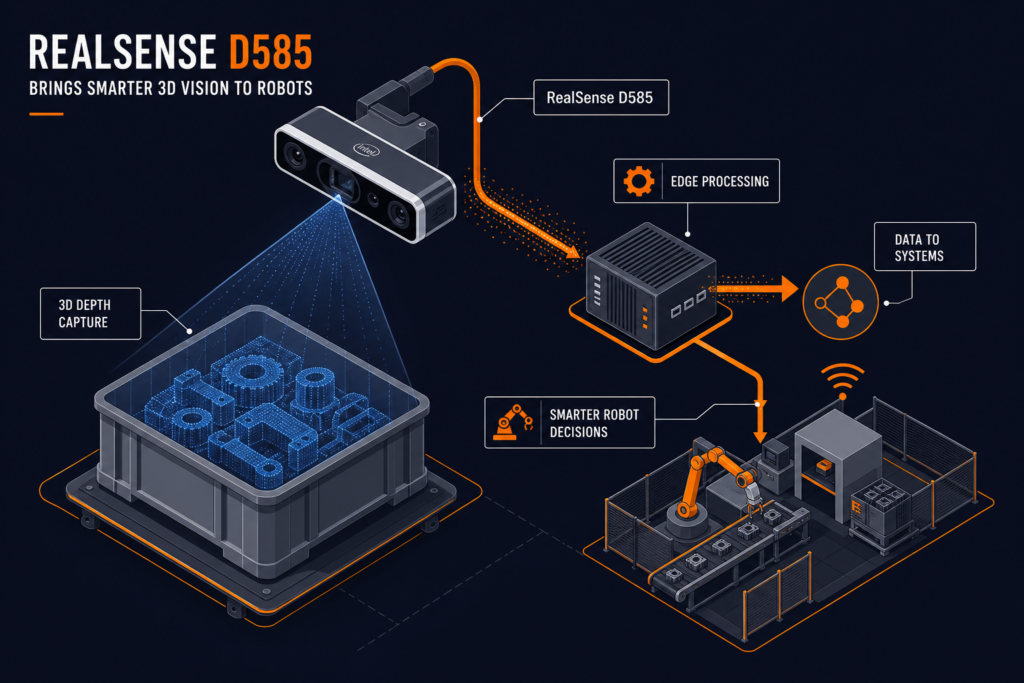
RealSense D585 apporte une vision 3D plus intelligente aux robots
La nouvelle caméra de profondeur D585 de RealSense combine l'IA sur appareil, une portée de 20 m et une détection à courte portée, avec des implications pour le soudage robotique, le suivi de joints et l'automatisation flexible des cellules.
RealSense D585 élargit le rôle de la vision 3D en robotique
RealSense a introduit la caméra de profondeur D585 comme une nouvelle plateforme de vision 3D pour la robotique, avec un ensemble de spécifications directement pertinentes pour l’automatisation industrielle. Comme l’a d’abord rapporté Hackster.io, l’appareil combine la détection de profondeur avec le traitement AI sur puce pour réduire la quantité de traitement d’image qui doit être effectuée ailleurs dans le système. Selon les informations produit publiées par RealSense, la caméra prend en charge la mesure de profondeur à partir de 10 cm, atteint plus de 20 m, fonctionne jusqu’à 60 fps à pleine résolution et offre un champ de vision de 120 x 100 degrés. Pour les environnements de production, cette combinaison est importante car elle répond à deux contraintes persistantes à la fois : la nécessité de détecter des pièces et des bords à courte portée, et la nécessité de maintenir une conscience situationnelle sur des enveloppes de travail plus larges, des convoyeurs, des dispositifs ou des plateformes mobiles.
D’un point de vue manufacturier, le D585 concerne moins la perception de style consommateur et plus la facilitation du déploiement de la vision machine dans des cellules robotiques pratiques. Les intégrateurs font souvent face à un compromis entre la détection 3D haute performance et la complexité du système. Si plus de traitement peut être exécuté sur l’appareil, le fardeau sur le contrôleur de robot, le PC industriel ou l’ordinateur de périphérie peut être réduit. Cela peut simplifier l’architecture dans les cellules construites autour des plateformes ABB, KUKA, FANUC, Yaskawa, Universal Robots ou Doosan, en particulier là où la vision doit coexister avec la logique PLC, les dispositifs de sécurité, les sources de puissance de soudage et les fonctions IHM. Dans les lignes d’automatisation mixtes, une caméra qui peut prendre en charge la localisation d’objets, l’inspection et le guidage de robots sans surcharge de calcul excessive peut réduire le temps de mise en service et diminuer le nombre d’interfaces à valider.
Pourquoi la qualité de profondeur et l’IA en périphérie sont importantes sur le terrain
La signification technique du D585 réside dans la manière dont il combine détection et traitement. RealSense positionne le produit comme une plateforme de vision native AI plutôt qu’une simple mise à jour de caméra, et les communications produit ultérieures de l’entreprise autour de la famille D585 indiquent un mouvement plus large vers une perception définie par logiciel pour la robotique. La couverture de The Robot Report souligne la même direction : détection de profondeur, accélération AI en périphérie et une plateforme destinée à améliorer les capacités via des logiciels. Pour les utilisateurs industriels, cette approche peut soutenir une détection plus stable sous un éclairage variable, des surfaces réfléchissantes ou une présentation de pièces changeante, bien que les performances réelles dépendent toujours de l’étalonnage, du montage, du blindage et du réglage de l’application.
Dans le soudage et la fabrication métallique, la vision 3D reste un défi car l’environnement est rarement propre ou statique. Les dispositifs varient, les soudures d’assemblage déforment la géométrie, et les éclaboussures, la fumée et la lumière de l’arc peuvent interférer avec les systèmes optiques. Une caméra avec de meilleures performances à courte portée peut être utile pour la recherche de pièces avant soudage, la mesure d’écarts, la prise de pièces dans des bacs, la vérification de l’approche du torche et l’inspection post-soudage. Le champ de vision plus large a également une valeur pratique dans des cellules plus grandes où un seul capteur peut devoir surveiller une table, un positionneur ou une zone de transfert. Cependant, les intégrateurs devront encore évaluer si la caméra est utilisée avant l’ignition de l’arc, pendant le soudage ou après le processus, car chaque phase crée des conditions optiques et thermiques différentes. Dans de nombreux cas, les caméras de profondeur 3D complètent plutôt que remplacent les systèmes dédiés de suivi de joints au laser.
Ce que cela signifie pour les intégrateurs de cellules de soudage
Pour les concepteurs de cellules de soudage robotique, le D585 indique une tendance plus large : plus de perception se rapproche du capteur, et cela peut changer la manière dont les cellules sont conçues. Dans l’automatisation conventionnelle du soudage à l’arc, le suivi de joints et la localisation des pièces sont souvent gérés par des sous-systèmes séparés. Une caméra 3D avec traitement embarqué pourrait soutenir des tâches en amont telles que la détection de présence de pièces, la vérification des dispositifs, les contrôles d’orientation et la sélection de chemin adaptatif avant que le robot ne commence à souder. Cela est particulièrement pertinent dans la fabrication à haute mixité et faible volume, où le soudage cobot et les cellules robotiques flexibles sont censés gérer des géométries de pièces variables et des cycles de configuration plus courts. Les intégrateurs travaillant avec les plateformes ABB OmniCore, KUKA KR C5, FANUC R-30iB, Yaskawa Motoman, Universal Robots e-Series ou Doosan collaboratives peuvent voir de la valeur à utiliser une couche de vision commune à travers les étapes de chargement, de manipulation et de préparation de soudage.
Il existe également des considérations de normes et de conformité. Toute cellule de soudage guidée par vision doit être évaluée comme une machine ou un assemblage complet, et non comme une caméra isolée. Selon l’architecture, les cadres pertinents peuvent inclure l’ISO 10218 pour la sécurité des robots industriels, l’ISO/TS 15066 pour les applications collaboratives, l’IEC 60204-1 pour les équipements électriques des machines, et l’EN ISO 13849-1 pour les systèmes de contrôle liés à la sécurité. Lorsque les caméras influencent le mouvement du robot ou l’interaction avec l’opérateur, la distinction entre la détection de processus et la détection de sécurité doit rester claire. Une caméra de profondeur utilisée pour le guidage ne qualifie pas automatiquement comme un dispositif de protection certifié pour la sécurité. Pour les intégrateurs, cela signifie que le D585 peut améliorer la perception et l’adaptabilité, mais cela ne supprime pas la nécessité d’une protection validée, d’une évaluation des risques et d’une conception de sécurité fonctionnelle.
Implications pour l’automatisation flexible et l’approvisionnement
Pour les responsables de production et les équipes d’approvisionnement, la question pratique est de savoir si une vision 3D améliorée peut réduire les temps d’arrêt, les retouches manuelles et la dépendance aux dispositifs. Dans les opérations de soudage, une meilleure localisation des pièces peut aider à compenser la variation en amont des pièces découpées, des assemblages formés ou des gabarits chargés manuellement. Cela peut se traduire par moins de décalages de chemin de robot, moins de retouches et des temps de cycle plus stables, surtout lorsque les cellules sont censées passer entre des variantes de produits. La portée et le profil de fréquence d’images du D585 suggèrent qu’il peut également être pertinent au-delà des stations de soudage fixes, y compris les robots mobiles, les stations d’inspection et les cellules de manutention de matériaux qui alimentent les lignes de soudage. Le meilleur argument commercial est probablement là où une plateforme de capteur peut soutenir plusieurs tâches tout au long de la chaîne de processus plutôt que de servir d’add-on à usage unique.
L’adoption dépendra toujours de l’effort d’intégration, du support logiciel et de la robustesse dans des conditions industrielles difficiles. Les acheteurs voudront des preuves de répétabilité, de latence, de tolérance environnementale et de compatibilité avec les middleware existants, les interfaces de robot et les systèmes MES ou de qualité. Pour les applications de soudage, ils demanderont également comment la caméra se comporte autour des métaux réfléchissants, des surfaces sombres et de la lumière ambiante changeante. Ces questions sont typiques pour tout nouveau composant de vision entrant en production. Pourtant, le D585 montre que la détection 3D évolue vers des architectures plus compactes, plus intelligentes et plus déployables, ce qui est pertinent pour les fabricants cherchant à rendre les cellules de soudage robotiques plus adaptatives sans compliquer excessivement les contrôles.
Les entreprises évaluant le soudage robotique, le soudage cobot ou les mises à niveau de cellules guidées par vision peuvent demander un devis pour évaluer comment la détection 3D, le suivi de joints et les choix de conception de cellules s’adaptent à leur mix de production, à leurs exigences de sécurité et à leurs objectifs de qualité de soudure.
Articles liés
Demander un devis
Vous cherchez une configuration spécifique ou souhaitez discuter de notre stock actuel ? Parlez-nous de votre projet — nous répondons sous 24 heures depuis notre bureau de Bilbao.