FORT and NVIDIA Advance Outside-In Robot Safety
FORT Robotics and NVIDIA have introduced an Outside-In Safety blueprint that uses external sensing and AI to improve autonomous robot safety and uptime in industrial automation.
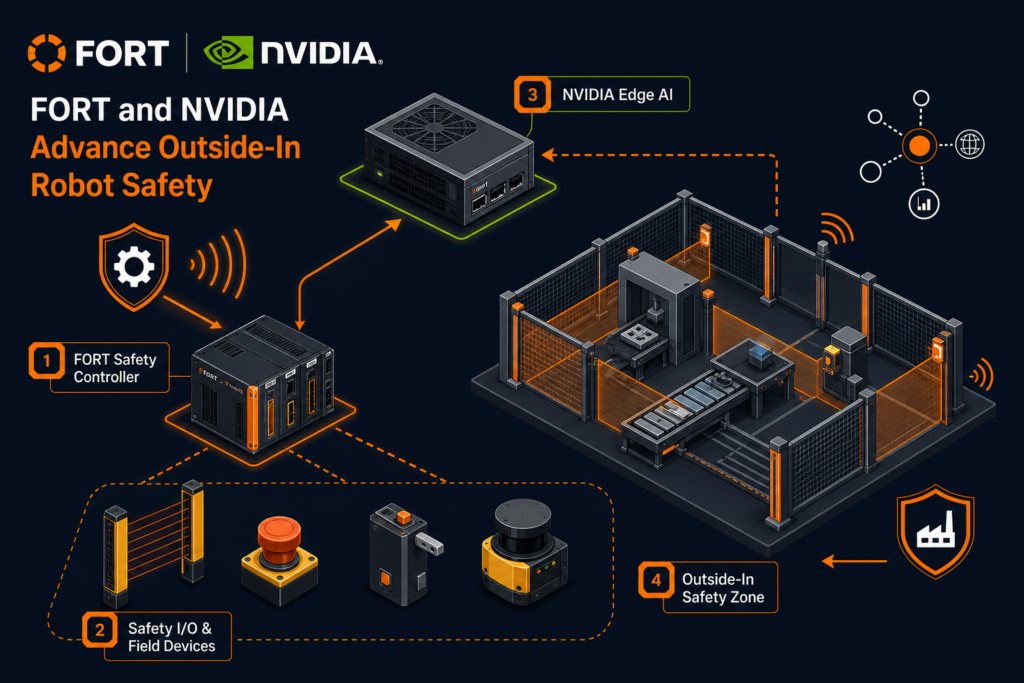
FORT Robotics and NVIDIA have introduced an Outside-In Safety blueprint aimed at changing how autonomous robots are monitored in industrial environments. Reported first by The Robot Report, the approach adds an external safety layer around mobile and autonomous systems, using sensors positioned in the workcell or facility rather than relying only on onboard perception and local emergency-stop logic. The stated objective is to improve worker protection while reducing unnecessary slowdowns and stoppages that can limit the return on automation investments. For manufacturers evaluating autonomous material handling, inspection robots, or AI-enabled collaborative systems, the announcement reflects a broader shift from machine-centric safety to environment-aware safety architectures.
From onboard safety to environment-aware supervision
The technical premise is straightforward: a robot does not need to be the only device responsible for understanding risk in its surroundings. According to a PR Newswire release, FORT is extending its Trust Layer for Physical AI by adding Outside-In Safety in collaboration with NVIDIA Halos for Robotics. In practice, that means fixed sensors, external compute, and supervisory logic can observe robot motion, human presence, and shared-space conditions from outside the machine envelope. This is relevant because onboard cameras and scanners can be obstructed, affected by lighting, or limited by mounting position. An external layer can provide redundancy, wider field of view, and a more consistent basis for triggering speed reduction, stop commands, or access control actions.
NVIDIA has positioned Halos for Robotics as a full-stack safety system for physical AI. In its announcement, NVIDIA Newsroom said the platform combines hardware, AI models, tools, and software intended to support functional safety for robotics applications. NVIDIA also identified industrial users, including FORT Robotics, as developers of functional safety agents based on the Halos Outside-In Safety Blueprint. This matters in manufacturing because AI-enabled robots are increasingly expected to operate in less structured spaces, where deterministic guarding alone is not always sufficient. Traditional fencing, light curtains, safety PLCs, and area scanners remain essential, but external AI-based supervision could become an additional layer for dynamic risk assessment.
Why the model matters for industrial automation
For production managers and manufacturing engineers, the operational value lies in balancing safety integrity with productivity. Autonomous systems often lose efficiency when safety settings are overly conservative, especially in mixed-traffic areas where people, forklifts, AGVs, and robots share floor space. Outside-In Safety suggests a way to distinguish between real hazards and non-critical events more accurately. If an external sensing system can verify worker position, robot trajectory, and zone occupancy with higher confidence, the system may avoid unnecessary stops while still enforcing protective actions when thresholds are exceeded. This is particularly relevant as factories deploy more mobile manipulators, palletizing cells, and cobot-assisted stations alongside fixed industrial robots from ABB, KUKA, FANUC, Yaskawa, Universal Robots, and Doosan.
The standards dimension remains critical. Any AI-assisted safety architecture in Europe still has to be assessed against established functional safety and machinery safety frameworks, including IEC 61508, ISO 13849, IEC 62061, and the EN ISO 10218 series for industrial robots. For collaborative applications, ISO/TS 15066 remains central when defining force, pressure, and separation requirements. External sensing can support speed and separation monitoring, but integrators will still need validated safety functions, documented performance levels or SIL targets, and clear allocation of responsibility between robot controller, safety PLC, scanner, vision system, and supervisory AI. The likely near-term role of blueprints such as Halos is therefore not to replace certified safety components, but to help structure how AI perception can be deployed around them in a defensible system design.
What this means for welding cell integrators
For robotic welding and cobot welding, the implications are practical rather than theoretical. Welding cells already combine multiple hazards: arc radiation, hot workpieces, spatter, fume extraction constraints, moving axes, fixtures, and often part transfer by operator or conveyor. In a conventional cell, safety is dominated by fencing, interlocked doors, safety relays, scanners, and programmed safe zones. An outside-in model could add overhead or perimeter sensing to monitor operator approach, confirm fixture occupancy, or supervise shared loading areas where a welding robot and a human may alternate tasks. In high-mix fabrication, where parts vary and manual intervention is frequent, that extra environmental awareness could help reduce nuisance stops without weakening protection.
There are also design implications for integrators building cells around ABB, KUKA, FANUC, Yaskawa, Universal Robots, or Doosan platforms. External AI-based supervision may influence camera placement, network architecture, latency budgets, and the segregation of safety-rated versus non-safety-rated data paths. Integrators will need to decide which functions remain hardwired and certified, and which can be advisory or productivity-oriented. In welding, this distinction is especially important because arc flash, smoke, reflective surfaces, and thermal distortion can degrade perception quality. Any outside-in layer must therefore be engineered with the same discipline applied to robot reach studies, torch access, wire routing, and EN-compliant guarding. The opportunity is strongest in semi-automated cells where operators load parts, inspect tack quality, or perform rework close to the robot envelope.
A signal of broader change in physical AI safety
The FORT-NVIDIA announcement is best read as part of a wider industrial trend: safety architectures are expanding from isolated machine protection toward coordinated, data-rich supervision of the entire workspace. As AI becomes more common in robotics, manufacturers will expect systems that can interpret context, not just react to a broken beam or opened gate. That does not remove the need for rigorous validation, nor does it simplify compliance under IEC, ISO, and EN requirements. It does, however, point to a future in which autonomous robots, cobots, and welding cells are designed with layered perception and more adaptive protective behavior from the outset.
For manufacturers and integrators assessing the next generation of robotic welding cells or collaborative welding stations, this development is a useful reference point when reviewing safety architecture options. Companies that want to evaluate how external sensing, certified safety components, and robot selection can be combined in a practical cell design can request a quote for a tailored welding automation study.
Related articles
Request a quote
Looking for a specific configuration, or want to discuss our current stock? Tell us about your project — we reply within 24 hours from our Bilbao office.