Güdel Espande la Rettifica Robotica con Movimento Multi-Asse
Güdel presenterà i sistemi di movimento TMV e TMF ad Automate 2026, aggiungendo movimento verticale e orizzontale alla rettifica robotica e offrendo insegnamenti per la progettazione delle celle di saldatura.
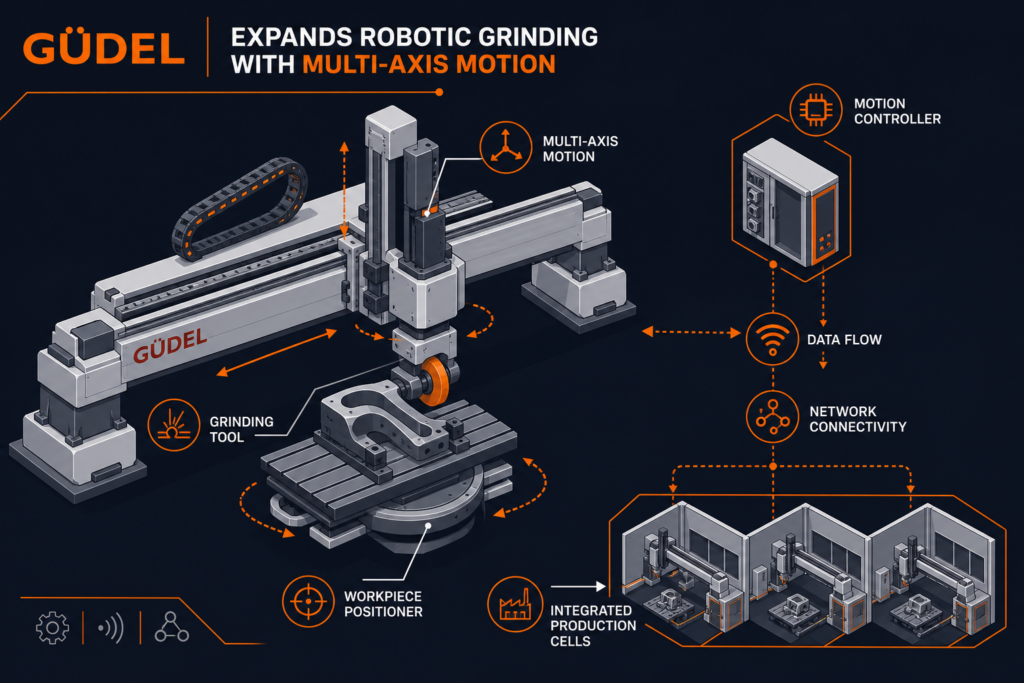
Güdel sta utilizzando Automate 2026 per evidenziare un cambiamento pratico nella rimozione di materiale robotica: invece di mantenere il robot fisso e costringere grandi parti a rientrare in un’area di lavoro limitata, l’azienda sta aggiungendo assi di movimento esterni per muovere il robot attraverso il processo. Secondo il rapporto originale di The Robot Report, i sistemi TMV e TMF dell’azienda aggiungono due gradi di libertà alle applicazioni di rettifica pesante, combinando movimento verticale e orizzontale per lavorare su grandi saldature. L’approccio è rivolto ai produttori che devono lavorare strutture fabbricate sovradimensionate senza fare affidamento sulla rettifica manuale o sul riposizionamento ripetuto delle parti. Per i responsabili della produzione e gli ingegneri di produzione, il significato è meno legato a una dimostrazione in fiera e più a come il movimento lineare esterno può estendere la portata del robot, stabilizzare i tempi di ciclo e ridurre l’esposizione ergonomica nelle operazioni di finitura che spesso si trovano accanto alla saldatura.
Dalle celle robotiche fisse a involucri di processo estesi
Il concetto centrale dietro la dimostrazione è semplice: un robot montato su una piattaforma di movimento può coprire un’area di processo molto più ampia rispetto a un robot stazionario da solo. Güdel ha dichiarato che la sua esposizione ad Automate 2026 mostrerà il movimento verticale e orizzontale integrato attraverso i sistemi TMV e TMF, con l’applicazione sviluppata dall’integratore di sistemi Titan Robotics per la rettifica di grandi saldature utilizzate da un importante produttore di attrezzature per fuoristrada, come riportato da Business Wire. Una descrizione simile pubblicata da RoboticsTomorrow sottolinea che l’obiettivo è superare le limitazioni delle tradizionali celle robotiche fisse nella rettifica pesante. In termini pratici, ciò significa che il robot può mantenere una migliore orientazione degli utensili e condizioni di contatto più coerenti su una parte più grande, piuttosto che operare vicino al limite del proprio raggio cinetico dove la velocità, la rigidità e la qualità del percorso possono degradare.
Questo è importante perché la rettifica robotica delle fabbricazioni saldate è raramente un processo isolato. In molte fabbriche, la rettifica, la pulizia delle giunzioni di saldatura, la preparazione dei bordi e la finitura post-saldatura sono collegate direttamente alla saldatura robotica a monte. Grandi telai, componenti di telaio e assemblaggi strutturali spesso superano la portata confortevole di un robot a sei assi, anche quando montato su una pista a terra. Aggiungere movimento verticale e orizzontale coordinato può ridurre la necessità di dispositivi di fissaggio sovradimensionati, tavole girevoli o interventi manuali. Può anche aiutare gli integratori a preservare un layout della cella più compatto pur gestendo parti lunghe o alte. Questo è rilevante per tutti i marchi di robot, che l’arto articolato sia fornito da ABB, KUKA, FANUC, Yaskawa, Universal Robots o Doosan, perché la questione ingegneristica non è solo l’arto ma l’intero sistema cinetico, compresi assi esterni, utensili, protezioni e controllo del processo.
Perché gli assi esterni sono importanti nelle applicazioni ad alta forza
La rettifica pone richieste diverse su una cella robotica rispetto alla saldatura ad arco. Il processo introduce forze di contatto sostenute, vibrazioni, polvere abrasiva e sensibilità alla conformità. Un robot stazionario può funzionare bene su parti più piccole, ma grandi saldature spesso richiedono raggi scomodi e angoli di utensile variabili che influenzano la coerenza della forza e la qualità della superficie. Muovendo il robot con un sistema di assi esterni rigidi, l’integratore può mantenere l’arto in una postura più favorevole e distribuire il movimento su tutto il sistema. Ciò può migliorare la ripetibilità del percorso e ridurre lo stress meccanico sulle articolazioni del robot. Per le applicazioni pesanti, la rigidità della piattaforma di movimento diventa un parametro di design critico, specialmente se confrontata con configurazioni collaborative più leggere più comuni nella lucidatura o nella sbavatura.
Esiste anche una dimensione di controllo. Il movimento coordinato tra il robot e gli assi esterni richiede un’integrazione attenta della sicurezza, dell’interpolazione e della sincronizzazione del processo. I fornitori di robot industriali come ABB, KUKA, FANUC e Yaskawa hanno a lungo supportato assi esterni coordinati in celle ad alta capacità di carico, mentre i fornitori di cobot come Universal Robots e Doosan sono più comunemente utilizzati dove sono coinvolte forze inferiori, programmazione più semplice e parti più piccole. Per qualsiasi architettura, la conformità ai requisiti di sicurezza delle macchine e dei robot rimane centrale. Gli integratori devono tipicamente allineare il design della cella con ISO 10218 per la sicurezza dei robot industriali, ISO/TS 15066 dove è rilevante l’operazione collaborativa, e quadri di sicurezza delle macchine più ampi come IEC 60204-1 per le attrezzature elettriche e le applicabili norme EN ISO per la protezione, la valutazione del rischio e le funzioni di arresto di emergenza nel mercato europeo. Man mano che vengono aggiunti assi esterni, il monitoraggio della velocità sicura, le funzioni di posizione sicura e la zonizzazione degli accessi diventano più complesse, particolarmente dove gli operatori caricano grandi fabbricazioni o eseguono ispezioni tra i passaggi del processo.
Cosa significa questo per gli integratori di celle di saldatura
Per gli integratori di celle di saldatura, il messaggio di Güdel si estende oltre la rettifica. La stessa logica può essere applicata alla saldatura robotica, alla saldatura con cobot e alle celle ibride dove la saldatura è seguita dalla finitura delle giunzioni o dall’ispezione. Grandi saldature spesso creano un disallineamento tra la dimensione della parte e la portata del robot, portando a compromessi nell’angolo della torcia, nel percorso dei cavi, nell’accessibilità dei dispositivi di fissaggio e nell’accesso al servizio. Un modulo di movimento verticale o orizzontale può aiutare a mantenere un’orientazione di saldatura ottimale, migliorare l’accesso a più posizioni delle giunzioni e ridurre il numero di riposizionamenti delle parti. In una cella combinata di saldatura e rettifica, gli assi esterni possono anche supportare un flusso di processo più pulito consentendo a un robot di saldare e a un altro di finire all’interno di zone di lavoro coordinate, o consentendo a un singolo robot di cambiare utensili se il tempo di ciclo lo consente.
Ci sono compromessi progettuali. Assi aggiuntivi aumentano i costi di capitale, la complessità dei controlli, il tempo di messa in servizio e i requisiti di manutenzione. Richiedono anche una maggiore attenzione alla calibrazione, al posizionamento assoluto e alla protezione dalla polvere, specialmente se i detriti di rettifica sono presenti vicino a guide lineari o portacavi. Tuttavia, per i produttori che lavorano telai agricoli lunghi, componenti di attrezzature da costruzione, strutture per rimorchi o sottoassemblaggi pesanti, il ritorno può derivare da una riduzione della finitura manuale, un throughput più stabile e una migliore coerenza tra le superfici saldate e finite. Gli integratori che valutano tali sistemi dovranno confrontare l’economia del movimento esterno rispetto ad alternative come robot più grandi, posizionatori a doppia stazione, sistemi a ponte o flussi di prodotto riprogettati.
Implicazioni più ampie per la fabbricazione automatizzata
La dimostrazione di Güdel ad Automate 2026 riflette una tendenza più ampia nella fabbricazione automatizzata: i guadagni di produttività derivano sempre più dal design del movimento a livello di sistema piuttosto che dall’arto del robot da solo. Man mano che i produttori spingono l’automazione in parti più grandi e variabili, l’integrazione di piste, sollevatori, ponti e posizionatori coordinati diventa più rilevante rispetto alla semplice selezione di un robot a maggiore capacità di carico. Questo è particolarmente vero nei settori in cui le saldature sono fisicamente grandi ma i volumi di produzione non giustificano linee di trasferimento completamente personalizzate. Per le PMI della lavorazione dei metalli e i fornitori di Tier-1, la lezione è che il movimento esterno flessibile può sbloccare applicazioni che precedentemente rimanevano manuali perché il robot non poteva raggiungere il lavoro in modo efficiente o sicuro.
Le aziende che esaminano la saldatura robotica, la rettifica post-saldatura o layout di celle multi-processo possono utilizzare sviluppi come questo come parametro di riferimento per progetti futuri. I lettori che valutano se assi esterni, movimento coordinato o una cella combinata di saldatura e finitura soddisfano le loro esigenze di produzione possono richiedere un preventivo per una cella di saldatura robotica chiavi in mano su misura per dimensione della parte, throughput e requisiti di conformità.
Related articles
Richiedi un preventivo
Cerchi una configurazione specifica o vuoi parlarci della nostra disponibilità attuale? Raccontaci il tuo progetto — rispondiamo entro 24 ore dal nostro ufficio di Bilbao.