Güdel Élargit le Meulage Robotique avec un Mouvement Multi-Axes
Güdel présentera les systèmes de mouvement TMV et TMF à Automate 2026, ajoutant des déplacements verticaux et horizontaux au meulage robotique et offrant des leçons pour la conception de cellules de soudage.
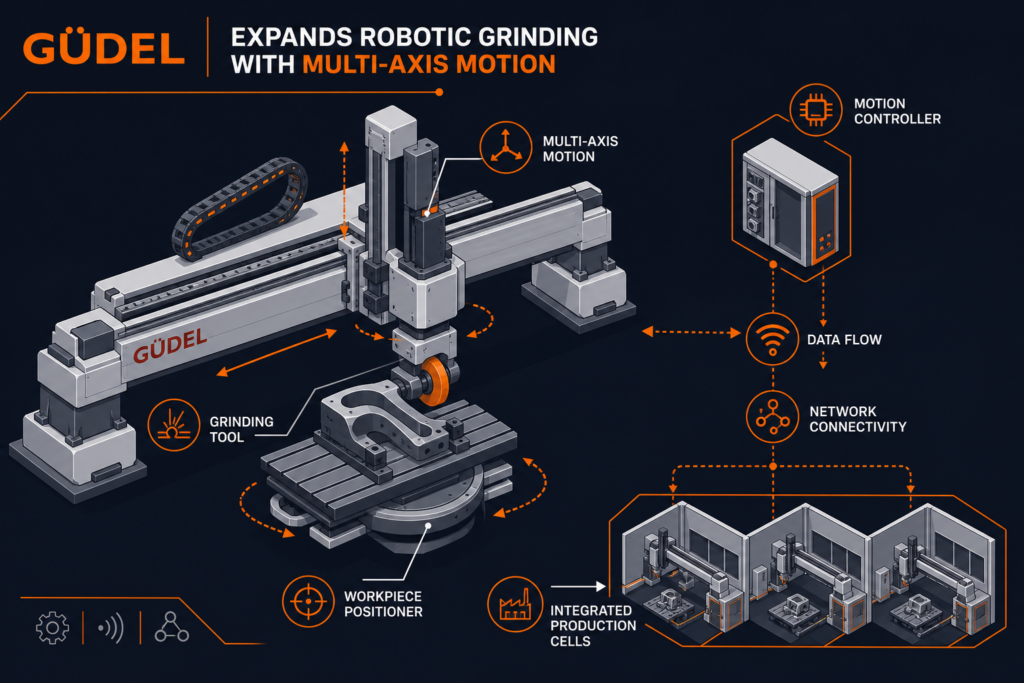
Güdel utilise Automate 2026 pour mettre en avant un changement pratique dans l’élimination de matériaux robotique : au lieu de garder le robot fixe et de forcer de grandes pièces à s’adapter à un volume de travail limité, l’entreprise ajoute des axes de mouvement externes pour déplacer le robot tout au long du processus. Selon le rapport original de The Robot Report, les systèmes TMV et TMF de l’entreprise ajoutent deux degrés de liberté aux applications de meulage lourdes, combinant des déplacements verticaux et horizontaux pour le travail sur de grandes structures soudées. L’approche vise les fabricants qui ont besoin de traiter des structures fabriquées surdimensionnées sans recourir à un meulage manuel ou à un repositionnement répété des pièces. Pour les responsables de production et les ingénieurs de fabrication, l’importance réside moins dans une démonstration lors d’un salon professionnel et plus dans la manière dont le mouvement linéaire externe peut étendre la portée du robot, stabiliser les temps de cycle et réduire l’exposition ergonomique dans les opérations de finition qui se trouvent souvent à côté du soudage.
Des cellules de robots fixes aux enveloppes de processus étendues
Le concept de base derrière la démonstration est simple : un robot monté sur une plateforme de mouvement peut couvrir une zone de processus beaucoup plus grande qu’un robot stationnaire seul. Güdel a déclaré que son exposition à Automate 2026 montrera un mouvement vertical et horizontal intégré grâce aux systèmes TMV et TMF, avec l’application développée par l’intégrateur de systèmes Titan Robotics pour le meulage de grandes structures soudées utilisées par un important fabricant d’équipements tout-terrain, comme l’a rapporté Business Wire. Une description similaire publiée par RoboticsTomorrow souligne que l’objectif est de surmonter les limitations des cellules de robots fixes traditionnelles dans le meulage lourd. En termes pratiques, cela signifie que le robot peut maintenir une meilleure orientation de l’outil et des conditions de contact plus cohérentes sur une plus grande pièce, plutôt que d’opérer près de la limite de sa plage cinématique où la vitesse, la rigidité et la qualité du chemin peuvent se dégrader.
Cela est important car le meulage robotique des fabrications soudées est rarement un processus isolé. Dans de nombreuses usines, le meulage, le nettoyage des soudures, la préparation des bords et la finition post-soudage sont directement liés au soudage robotisé en amont. De grands cadres, des composants de châssis et des assemblages structurels dépassent souvent la portée confortable d’un robot à six axes, même lorsqu’ils sont montés sur un rail au sol. L’ajout de déplacements verticaux et horizontaux coordonnés peut réduire le besoin de dispositifs de fixation surdimensionnés, de tables tournantes ou d’interventions manuelles. Cela peut également aider les intégrateurs à préserver un agencement de cellule plus compact tout en gérant des pièces longues ou hautes. Cela est pertinent pour toutes les marques de robots, que le bras articulé soit fourni par ABB, KUKA, FANUC, Yaskawa, Universal Robots ou Doosan, car la question d’ingénierie ne concerne pas seulement le bras mais l’ensemble du système cinématique, y compris les axes externes, l’outillage, la protection et le contrôle du processus.
Pourquoi les axes externes sont importants dans les applications à forte force
Le meulage impose des exigences différentes à une cellule robotique par rapport au soudage à l’arc. Le processus introduit des forces de contact soutenues, des vibrations, de la poussière abrasive et une sensibilité à la conformité. Un robot stationnaire peut bien fonctionner sur de petites pièces, mais de grandes structures soudées nécessitent souvent des portées difficiles et des angles d’outil changeants qui affectent la cohérence de la force et la qualité de surface. En déplaçant le robot avec un système d’axes externes rigides, l’intégrateur peut garder le bras dans une posture plus favorable et répartir le mouvement sur l’ensemble du système. Cela peut améliorer la répétabilité du chemin et réduire le stress mécanique sur les articulations du robot. Pour les applications lourdes, la rigidité de la plateforme de mouvement devient un paramètre de conception critique, surtout par rapport à des configurations collaboratives plus légères, plus courantes dans le polissage ou le débourrage.
Il existe également une dimension de contrôle. Le mouvement coordonné entre le robot et les axes externes nécessite une intégration soigneuse de la sécurité, de l’interpolation et de la synchronisation des processus. Les fournisseurs de robots industriels tels qu’ABB, KUKA, FANUC et Yaskawa ont longtemps soutenu des axes externes coordonnés dans des cellules à charge élevée, tandis que les fournisseurs de cobots, y compris Universal Robots et Doosan, sont plus couramment utilisés là où des forces plus faibles, une programmation plus facile et des pièces plus petites sont impliquées. Pour toute architecture, la conformité aux exigences de sécurité des machines et des robots reste centrale. Les intégrateurs doivent généralement aligner la conception de la cellule avec ISO 10218 pour la sécurité des robots industriels, ISO/TS 15066 lorsque l’opération collaborative est pertinente, et des cadres de sécurité des machines plus larges tels que IEC 60204-1 pour l’équipement électrique et les normes EN ISO applicables pour la protection, l’évaluation des risques et les fonctions d’arrêt d’urgence sur le marché européen. À mesure que des axes externes sont ajoutés, la surveillance de la vitesse de sécurité, les fonctions de position sécurisée et le zonage d’accès deviennent plus complexes, notamment lorsque les opérateurs chargent de grandes fabrications ou effectuent des inspections entre les étapes du processus.
Ce que cela signifie pour les intégrateurs de cellules de soudage
Pour les intégrateurs de cellules de soudage, le message de Güdel va au-delà du meulage. La même logique peut être appliquée au soudage robotique, au soudage de cobots et aux cellules hybrides où le soudage est suivi de la finition des soudures ou de l’inspection. De grandes structures soudées créent souvent un décalage entre la taille de la pièce et la portée du robot, entraînant des compromis dans l’angle de la torche, le routage des câbles, l’accessibilité des dispositifs de fixation et l’accès aux services. Un module de mouvement vertical ou horizontal peut aider à maintenir une orientation de soudage optimale, améliorer l’accès à plusieurs emplacements de soudure et réduire le nombre de re-fixations de pièces. Dans une cellule combinée de soudage et de meulage, les axes externes peuvent également soutenir un flux de processus plus propre en permettant à un robot de souder et à un autre de finir dans des zones de travail coordonnées, ou en permettant à un seul robot de changer d’outil si le temps de cycle le permet.
Il existe des compromis de conception. Des axes supplémentaires augmentent le coût d’investissement, la complexité des contrôles, le temps de mise en service et les exigences de maintenance. Ils nécessitent également une attention plus forte à l’étalonnage, au positionnement absolu et à la protection contre la poussière, surtout si des débris de meulage sont présents près des guides linéaires ou des porte-câbles. Pourtant, pour les fabricants traitant de longs cadres agricoles, des composants d’équipements de construction, des structures de remorques ou des sous-assemblages lourds fabriqués, le retour peut provenir d’une réduction de la finition manuelle, d’un débit plus stable et d’une meilleure cohérence entre les surfaces soudées et finies. Les intégrateurs évaluant de tels systèmes devront comparer l’économie du mouvement externe avec des alternatives telles que des robots plus grands, des positionneurs à double station, des systèmes de portique ou un flux de produit redessiné.
Implications plus larges pour la fabrication automatisée
La démonstration de Güdel à Automate 2026 reflète une tendance plus large dans la fabrication automatisée : les gains de productivité proviennent de plus en plus de la conception de mouvement au niveau du système plutôt que du bras robotique seul. À mesure que les fabricants poussent l’automatisation vers des pièces plus grandes et plus variables, l’intégration de rails, de levées, de portiques et de positionneurs coordonnés devient plus pertinente que de simplement sélectionner un robot à charge plus élevée. Cela est particulièrement vrai dans les secteurs où les soudures sont physiquement grandes mais où les volumes de production ne justifient pas des lignes de transfert entièrement sur mesure. Pour les PME de travail des métaux et les fournisseurs de niveau 1, la leçon est que le mouvement externe flexible peut débloquer des applications qui restaient auparavant manuelles parce que le robot ne pouvait pas atteindre le travail de manière efficace ou sûre.
Les entreprises examinant le soudage robotique, le meulage post-soudage ou les agencements de cellules multi-processus peuvent utiliser des développements comme celui-ci comme référence pour de futurs projets. Les lecteurs évaluant si des axes externes, un mouvement coordonné ou une cellule combinée de soudage et de finition correspondent à leurs besoins de production peuvent demander un devis pour une cellule de soudage robotique clé en main adaptée à la taille des pièces, au débit et aux exigences de conformité.
Articles liés
Demander un devis
Vous cherchez une configuration spécifique ou souhaitez discuter de notre stock actuel ? Parlez-nous de votre projet — nous répondons sous 24 heures depuis notre bureau de Bilbao.