Genesis AI GENE-26.5 erhöht die Geschicklichkeit in der Roboterhandhabung
🇩🇪DE▾🇬🇧English🇪🇸Español🇫🇷Français🇮🇹Italiano🇩🇪DeutschGENE-26.5 signalisiert einen neuen Schritt in der robotischen Geschicklichkeit Genesis AI hat GENE-26.5 eingeführt, ein Robotik-Grundlagenmodell, das auf höhere Ebenen der physischen Manipulation und die Ausführung langfristiger Aufgaben ausgerichtet ist. Die Ankündigung, die zuerst von The Robot Report berichtet wurde, beschreibt ein System, das eine fortschrittliche Datenengine mit einer proprietären Roboterhand kombiniert, um die Geschicklichkeit […]
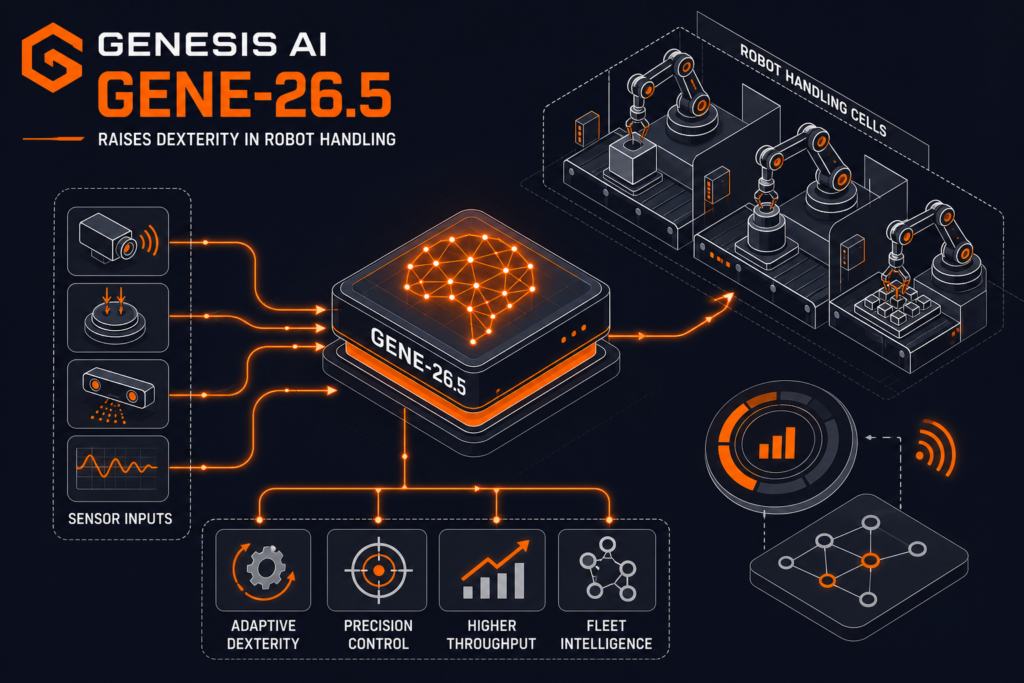
GENE-26.5 signalisiert einen neuen Schritt in der robotischen Geschicklichkeit
Genesis AI hat GENE-26.5 eingeführt, ein Robotik-Grundlagenmodell, das auf höhere Ebenen der physischen Manipulation und die Ausführung langfristiger Aufgaben ausgerichtet ist. Die Ankündigung, die zuerst von The Robot Report berichtet wurde, beschreibt ein System, das eine fortschrittliche Datenengine mit einer proprietären Roboterhand kombiniert, um die Geschicklichkeit bei kontaktintensiven Aufgaben zu verbessern. In paralleler Berichterstattung und von der Firma veröffentlichten Details, die von PR Newswire und RoboticsTomorrow verbreitet wurden, positioniert das Unternehmen GENE-26.5 als ein speziell entwickeltes KI-Modell für die Robotik, das große Datenmengen aus verschiedenen Umgebungen aufnehmen und menschlichere Manipulationsfähigkeiten unterstützen kann. Für industrielle Anwender ist die praktische Frage weniger eine Frage von Schlagzeilen und mehr, ob eine bessere Manipulation die Variabilität beim Handling, Laden, Ausrichten und der Werkzeuginteraktion innerhalb von Produktionszellen reduzieren kann.
Diese Frage ist wichtig, da viele automatisierte Fertigungsprozesse weiterhin von deterministischen Vorrichtungen und streng begrenzter Teilepräsentation abhängen. Selbst in hochautomatisierten Schweißlinien führt der Roboter oft den Schweißpfad zuverlässig aus, während das Handling im Vorfeld der Schwachpunkt bleibt. Variationen in der Teileplatzierung, dem Zustand der Heftung, der Kantenanpassung oder dem Zugang zum Brenner können Nacharbeiten, Spritzerprobleme, verpasste Nähte und Zykluszeitverluste verursachen. Ein Modell für geschickte Manipulation ersetzt nicht die Prozessgestaltung, könnte jedoch verbessern, wie Roboter sich an kleine Abweichungen anpassen, bevor das Schweißen beginnt. In Sektoren wie der Automobilindustrie Tier 1, der gefertigten Metallbaugruppen und der allgemeinen Industrieausrüstung könnte dies in stabileren Ladevorgängen von Unterkomponenten, besserem Übergang zwischen Stationen und weniger manuellen Eingriffen rund um Vorrichtungen und Halterungen resultieren.
Warum Manipulationsintelligenz in der industriellen Automatisierung wichtig ist
Die robotische Geschicklichkeit hat typischerweise hinter der Bewegungssteuerung von Robotern zurückgehangen. Große Anbieter von Industrierobotern wie ABB, KUKA, FANUC und Yaskawa haben seit langem eine hohe Wiederholgenauigkeit für Lichtbogenschweißen, Punktschweißen und Materialhandling geliefert, während Anbieter von kollaborativen Robotern wie Universal Robots und Doosan die flexible Automatisierung für die Produktion mit geringeren Stückzahlen erweitert haben. Dennoch bleibt die Herausforderung, unregelmäßige Teile zu greifen, Komponenten in engen Räumen neu auszurichten und auf unsichere Kontaktbedingungen zu reagieren, schwierig. Grundlagenmodelle für die Robotik zielen darauf ab, diese Lücke zu schließen, indem sie aus breiteren Datensätzen lernen, anstatt sich nur auf manuell programmierte Randfälle zu verlassen. Wenn solche Modelle reifen, könnten sie die Maschinenvision, Kraftmessung, Nahtverfolgung und adaptive Pfadkorrektur ergänzen, die bereits in fortschrittlichen Schweißzellen verwendet werden.
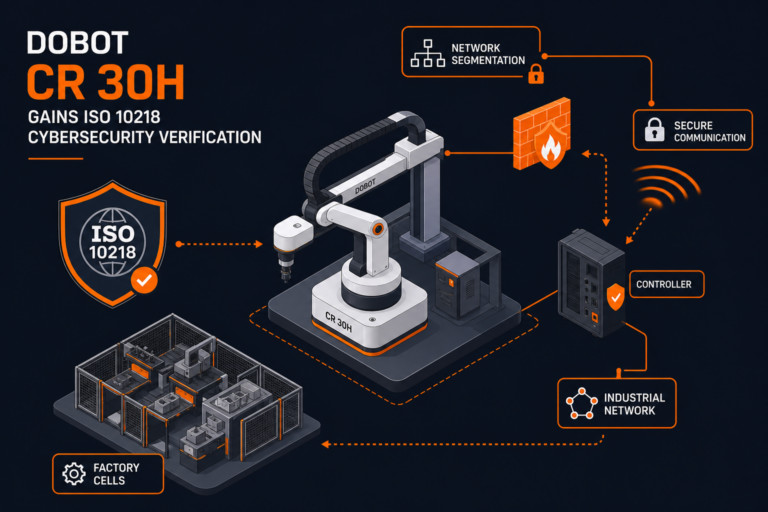
Für Schweißoperationen ist geschickte Manipulation über den Greifer hinaus relevant. Eine bessere Kontrolle des Teileansatzes, der Kontaktkraft und der Ausrichtung kann die Konsistenz des Wurzelspalts, die Zugänglichkeit der Fuge und die Stabilität der Schweißsequenz beeinflussen. Ein Roboter, der ein geformtes Halter oder eine Rohrbaugruppe zuverlässiger greifen, drehen und platzieren kann, könnte die Notwendigkeit komplexer Hartwerkzeuge reduzieren. Dies ist besonders relevant in der Mischproduktion, wo Hersteller die Umrüstzeiten verkürzen möchten, ohne die Qualität zu opfern. Die industrielle Implementierung wird jedoch weiterhin von der Validierung gegen etablierte Sicherheits- und Maschinenanforderungen abhängen, einschließlich relevanter ISO-, IEC- und EN-Rahmenwerke. Je nach Anwendung müssen Integratoren Standards wie ISO 10218 für die Sicherheit von Industrierobotern, ISO/TS 15066 für die kollaborative Bedienung, IEC 60204-1 für elektrische Ausrüstungen von Maschinen und EN ISO 13849 für sicherheitsbezogene Steuerungssysteme berücksichtigen. Jede KI-gesteuerte Manipulationsschicht, die in eine Schweißzelle eingeführt wird, muss im Rahmen der umfassenderen Risikoanalyse bewertet werden und darf nicht als eigenständiges Software-Upgrade behandelt werden.
Auswirkungen auf Schweißqualität, Vorrichtungen und Zellarchitektur
Die stärkste kurzfristige Auswirkung von Systemen wie GENE-26.5 könnte im Vor-Schweiß- und Zwischenprozess-Handling liegen, anstatt in der direkten Steuerung des Schweißlichtbogens. Die Schweißqualität hängt von vielen Variablen ab: Brennerwinkel, Vorschubgeschwindigkeit, Drahtzufuhr, Schutzgasabdeckung, Wärmeinput und Zustand des Werkstücks sind einige davon. Dennoch ist die Konsistenz, wie Teile an der Schweißposition ankommen, grundlegend. Wenn ein Manipulationsmodell geringfügige Teilevariationen effektiver handhaben kann, könnten Hersteller in der Lage sein, das Vorrichtungsdesign zu vereinfachen, Überklemmen zu reduzieren oder Aufgaben zu automatisieren, die derzeit einen Bediener erfordern, um Komponenten in Position zu bringen. Das könnte in KMU-Umgebungen von Wert sein, in denen die Produktvielfalt hoch und die Budgets für spezielle Werkzeuge begrenzt sind.
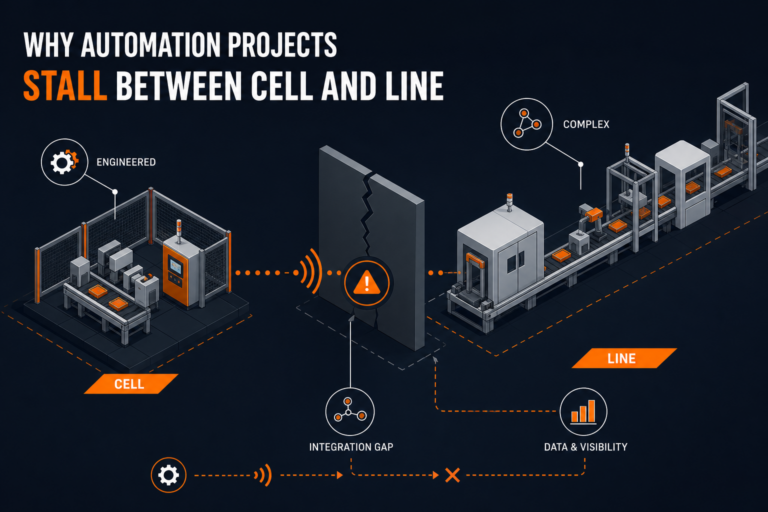
Es gibt auch Auswirkungen auf die Zellarchitektur. Integratoren kombinieren zunehmend 3D-Vision, Servopositionierer, Kraft-Drehmoment-Sensorik und Offline-Programmierung, um flexible robotergestützte Schweißsysteme zu bauen. Eine geschicktere Manipulationsschicht könnte beispielsweise vor dem Schweißroboter sitzen, etwa in einem Lade-Cobot, einer Dual-Roboter-Zelle oder einer robotergestützten Unterbaugruppe-Station, die Teile vor dem Schweißen vorbereitet. In schweren Anwendungen könnten Plattformen von ABB, KUKA, FANUC und Yaskawa die bevorzugte Wahl für Traglast, Reichweite und Lichtbogenprozessintegration bleiben. In leichteren Fertigungs- und Betreuungsaufgaben könnten Cobot-Lösungen von Universal Robots und Doosan von verbesserter Manipulationsintelligenz profitieren, wo sichere Mensch-Roboter-Kollaboration und schnelle Wiederbereitstellung Priorität haben. Die technische Herausforderung wird die Interoperabilität sein: KI-gesteuerte Manipulation muss mit der SPS-Logik, Sicherheitssteuerungen, Schweißstromquellen und Rückverfolgbarkeitssystemen, die bereits auf dem Shopfloor eingesetzt werden, funktionieren.
Was das für Schweißzellenintegratoren bedeutet
Für Schweißzellenintegratoren ist GENE-26.5 am besten als Indikator dafür zu betrachten, wohin sich das robotergestützte Handling entwickelt, anstatt als sofortiger Ersatz für bewährte Automatisierungsmethoden. Die Chance liegt darin, geschickte Manipulation mit robustem Schweißprozesskontrolle zu kombinieren. In Projekten für robotergestütztes Schweißen und Cobot-Schweißen könnte dies eine adaptivere Teileladung, automatisierte Neupositionierung zwischen den Schweißvorgängen und eine reduzierte Abhängigkeit von hochspezialisierten Vorrichtungen unterstützen. Integratoren, die schlüsselfertige Zellen entwerfen, müssen weiterhin die Qualifizierung von Schweißverfahren, Brennerreinigung, Rauchabsaugung, Schutzvorrichtungen, CE-Konformität und Wartungsfreundlichkeit priorisieren. Wenn Manipulationsmodelle jedoch unter industriellen Bedingungen zuverlässig werden, könnten sie den Bereich der Teile erweitern, die wirtschaftlich automatisiert werden können, insbesondere für Kleinserien und mittlere Mischproduktionen. Das wäre relevant für Systemanbieter, die Automobilzulieferer, Auftragshersteller und Metallverarbeitungs-KMUs bedienen, die Flexibilität benötigen, ohne die Wiederholgenauigkeit aufzugeben.
Die nächste Phase wird von Beweisen aus realen Einsätzen abhängen: Zykluszeit, Erfolgsquote beim Greifen, Fehlerbehebung und Leistung unter Hitze, Staub und Vibrationen, die typisch für Fertigungsumgebungen sind. Käufer werden auch Klarheit über Trainingsdaten, Edge-Deployment, Latenz und Cybersicherheit wünschen. Diese Faktoren werden bestimmen, ob geschickte KI eine Laborfähigkeit bleibt oder zu einer praktischen Schicht in der Produktionsautomatisierung wird.
Hersteller, die robotergestütztes Schweißen, Cobot-Schweißen oder flexiblere Teilehandhabung rund um Schweißstationen evaluieren, können ein Angebot anfordern, um zu prüfen, ob ein neues Zellendesign, eine Nachrüstung oder ein Handling-Upgrade messbare Verbesserungen in Qualität, Betriebszeit und Vorrichtungseffizienz liefern würde.
Related articles

Angebot anfordern
Suchen Sie eine bestimmte Konfiguration oder möchten Sie über unseren aktuellen Bestand sprechen? Erzählen Sie uns von Ihrem Projekt — wir antworten innerhalb von 24 Stunden aus unserem Büro in Bilbao.