Genesis AI GENE-26.5 Raises Dexterity in Robot Handling
Genesis AI’s GENE-26.5 foundation model points to more dexterous robot manipulation, with potential implications for fixturing, part handling, and precision in automated welding cells.
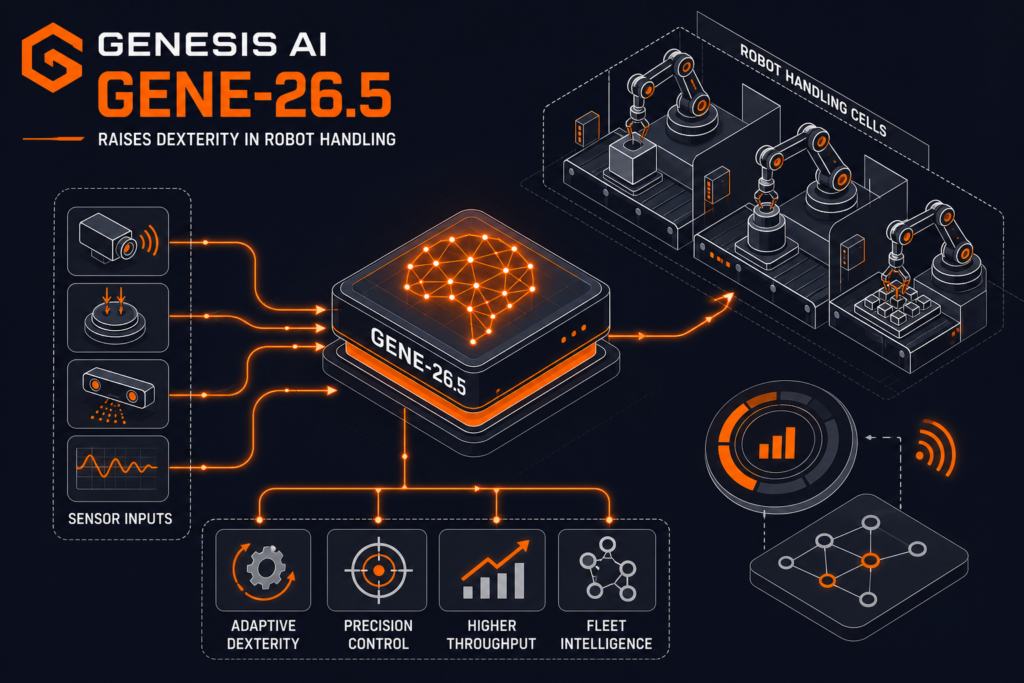
GENE-26.5 signals a new step in robotic dexterity
Genesis AI has introduced GENE-26.5, a robotics foundation model positioned around higher levels of physical manipulation and long-horizon task execution. The announcement, first reported by The Robot Report, describes a system that combines an advanced data engine with a proprietary robotic hand to improve dexterity in contact-rich tasks. In parallel coverage and company-issued details carried by PR Newswire and RoboticsTomorrow, the company frames GENE-26.5 as a purpose-built AI model for robotics that can absorb large volumes of data across environments and support more human-like manipulation capabilities. For industrial users, the practical question is less about headline claims and more about whether better manipulation can reduce variability in handling, loading, orientation, and tool interaction inside production cells.
That question matters because many automated manufacturing processes still depend on deterministic fixturing and tightly constrained part presentation. Even in highly automated welding lines, the robot often performs the weld path reliably while upstream handling remains the weak point. Variations in part placement, tack condition, edge alignment, or torch access can create rework, spatter issues, missed seams, and cycle-time losses. A dexterous manipulation model does not replace process engineering, but it could improve how robots adapt to small deviations before welding begins. In sectors such as automotive Tier 1, fabricated metal assemblies, and general industrial equipment, that may translate into more stable loading of subcomponents, better handoff between stations, and fewer manual interventions around jigs and fixtures.
Why manipulation intelligence matters in industrial automation
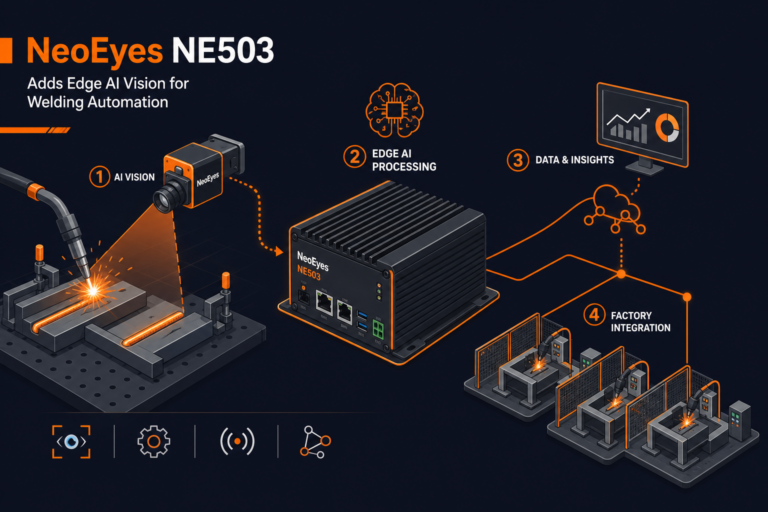
Robotic dexterity has typically lagged behind robot motion control. Major industrial robot vendors including ABB, KUKA, FANUC, and Yaskawa have long delivered high repeatability for arc welding, spot welding, and material handling, while collaborative robot suppliers such as Universal Robots and Doosan have expanded flexible automation for lower-volume production. Yet the challenge of grasping irregular parts, reorienting components in constrained spaces, and reacting to uncertain contact conditions remains difficult. Foundation models for robotics aim to address this gap by learning from broader datasets rather than relying only on manually programmed edge cases. If such models mature, they could complement machine vision, force sensing, seam tracking, and adaptive path correction already used in advanced welding cells.
For welding operations, dexterous manipulation is relevant beyond the gripper itself. Better control of part approach, contact force, and orientation can affect root gap consistency, joint accessibility, and the stability of the welding sequence. A robot that can more reliably pick, rotate, and place a formed bracket or tubular assembly may reduce the need for complex hard tooling. This is particularly relevant in mixed-model production, where manufacturers want to shorten changeovers without sacrificing quality. However, industrial deployment will still depend on validation against established safety and machine requirements, including relevant ISO, IEC, and EN frameworks. Depending on the application, integrators will need to consider standards such as ISO 10218 for industrial robot safety, ISO/TS 15066 for collaborative operation, IEC 60204-1 for electrical equipment of machines, and EN ISO 13849 for safety-related control systems. Any AI-driven manipulation layer introduced into a welding cell must be assessed within the broader risk analysis, not treated as a standalone software upgrade.
Implications for welding quality, fixturing, and cell architecture
The strongest near-term impact of systems like GENE-26.5 may be in pre-weld and inter-process handling rather than in direct control of the welding arc. Welding quality depends on many variables: torch angle, travel speed, wire feed, shielding gas coverage, heat input, and workpiece condition among them. Even so, the consistency of how parts arrive at the weld position is foundational. If a manipulation model can handle slight part variation more effectively, manufacturers may be able to simplify fixture design, reduce over-clamping, or automate tasks that currently require an operator to nudge components into place. That could be valuable in SME environments where product variety is high and dedicated tooling budgets are limited.
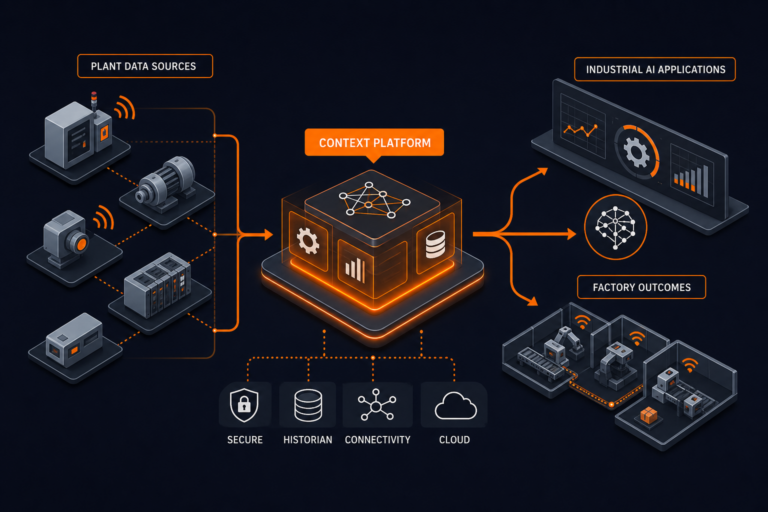
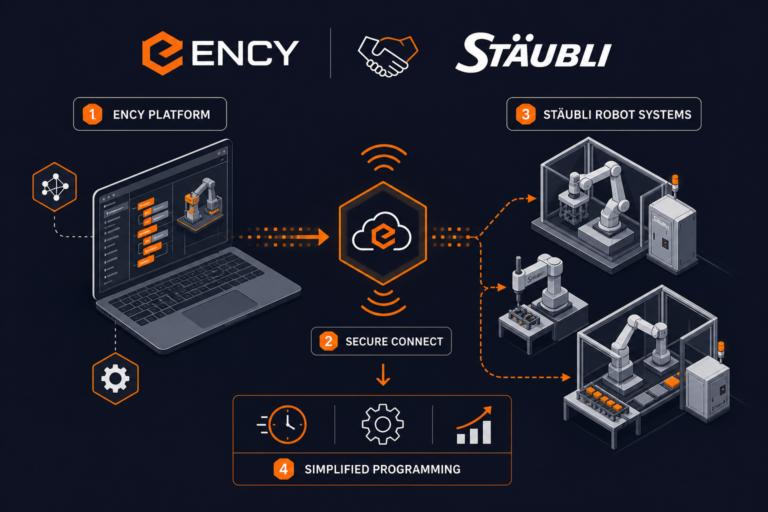
There are also implications for cell architecture. Integrators increasingly combine 3D vision, servo positioners, force-torque sensing, and offline programming to build flexible robotic welding systems. A more dexterous manipulation layer could sit upstream of the weld robot, for example in a loading cobot, a dual-robot cell, or a robotic subassembly station that prepares parts before welding. In heavy-duty applications, ABB, KUKA, FANUC, and Yaskawa platforms may remain the preferred choice for payload, reach, and arc process integration. In lighter fabrication and tending tasks, Universal Robots and Doosan cobots may benefit from improved manipulation intelligence where safe human-robot collaboration and fast redeployment are priorities. The technical challenge will be interoperability: AI-driven manipulation must work with PLC logic, safety controllers, welding power sources, and traceability systems already deployed on the shop floor.
What this means for welding cell integrators
For welding cell integrators, GENE-26.5 is best viewed as an indicator of where robotic handling is heading rather than as an immediate replacement for proven automation methods. The opportunity lies in combining dexterous manipulation with robust welding process control. In robotic welding and cobot welding projects, this could support more adaptive part loading, automated repositioning between welds, and reduced dependence on highly dedicated fixtures. Integrators designing turnkey cells will still need to prioritize weld procedure qualification, torch cleaning, fume extraction, guarding, CE compliance, and maintainability. But if manipulation models become reliable in industrial conditions, they could widen the range of parts that can be automated economically, especially for short runs and medium-mix production. That would be relevant for system builders serving automotive suppliers, contract manufacturers, and metalwork SMEs that need flexibility without giving up repeatability.
The next phase will depend on evidence from real deployments: cycle time, grasp success rate, recovery from errors, and performance under heat, dust, and vibration typical of fabrication environments. Buyers will also want clarity on training data, edge deployment, latency, and cybersecurity. Those factors will determine whether dexterous AI remains a laboratory capability or becomes a practical layer in production automation.
Manufacturers evaluating robotic welding, cobot welding, or more flexible part-handling around welding stations can request a quote to assess whether a new cell design, retrofit, or handling upgrade would deliver measurable gains in quality, uptime, and fixture efficiency.
Related articles
Request a quote
Looking for a specific configuration, or want to discuss our current stock? Tell us about your project — we reply within 24 hours from our Bilbao office.