Flexiv Adaptive Roboter erweitern die Möglichkeiten der industriellen Automatisierung
Die neuen adaptiven Roboter Enlight und Mico von Flexiv bieten Kraftkontrolle, taktile Sensorik und physische KI, mit Auswirkungen auf das Design von Schweißzellen, Vorrichtungen und die Mensch-Roboter-Zusammenarbeit.
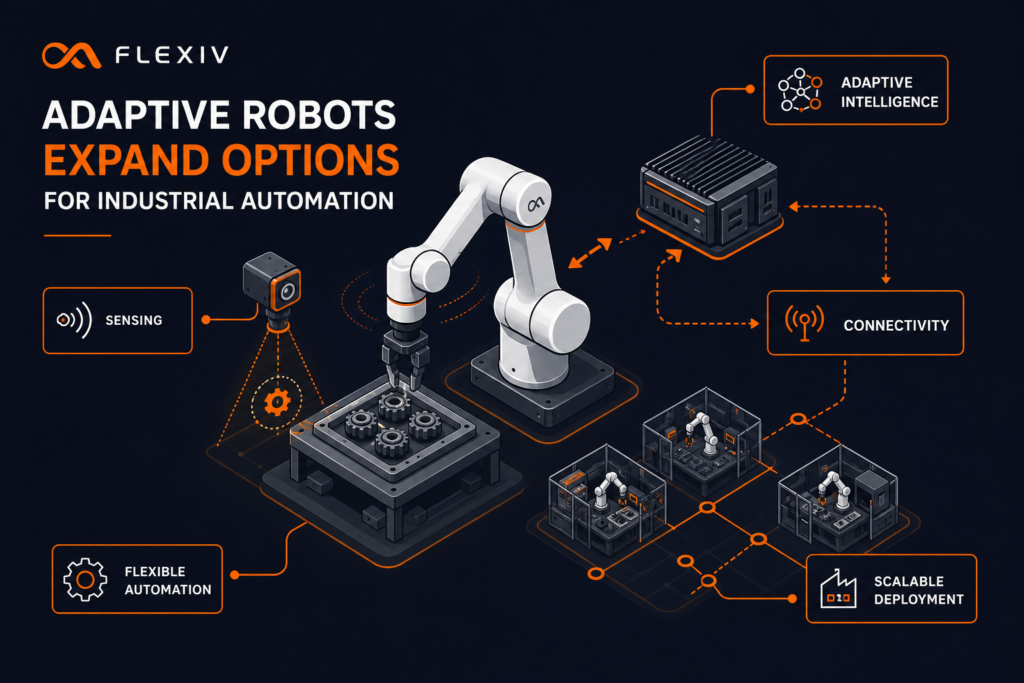
Flexiv hat zwei neue adaptive Roboterplattformen eingeführt, die sich an Nutzer der industriellen Automatisierung richten, die mehr als nur konventionelle Positionskontrolle benötigen. Laut dem ursprünglichen Bericht in Robotics & Automation News hat das Unternehmen den siebenachsigen Enlight Roboterarm und die Mico Dual-Arm-Plattform als Systeme vorgestellt, die auf Kraftkontrolle, taktile Sensorik und das, was Flexiv als physische KI beschreibt, basieren. Die Ankündigung ist wichtig, da viele Fabrikaufgaben immer noch Unsicherheiten beim Kontakt, Teilevariationen und manuelle Kompensation beinhalten, insbesondere in der Metallverarbeitung, Montage und Endbearbeitung. Roboter, die Kraft in Echtzeit wahrnehmen und darauf reagieren können, könnten die Menge an Hartwerkzeugen, präzisen Vorrichtungen und Teilepräsentationen reduzieren, die Integratoren typischerweise in eine Zelle einbringen müssen.
Flexiv positioniert seine Technologie als Brücke zwischen der Robustheit industrieller Roboter und der Anpassungsfähigkeit von kollaborativen Robotern. Auf seiner Unternehmenswebsite sagt das Unternehmen, dass seine adaptiven Roboter industrielle Kraftkontrolle mit fortschrittlicher KI kombinieren, um komplexe Umgebungen und menschenähnliche Interaktionen mit Teilen und Werkzeugen zu bewältigen, während die Anwendungsseite Anwendungsfälle in Fertigungsabläufen hervorhebt, die von Compliance und Kontaktbewusstsein profitieren, von Einfügen und Polieren bis hin zu Maschinenbetreuung und Montageaufgaben Flexiv Flexiv. Diese Positionierung platziert Flexiv in einem Segment neben etablierten Anbietern von Industrierobotern und Cobots wie ABB, KUKA, FANUC, Yaskawa, Universal Robots und Doosan, die alle ihre Portfolios um einfachere Programmierung, sicherere menschliche Interaktion und sensorbasierte Automatisierung erweitern. Der Unterschied in der Botschaft von Flexiv liegt in der Betonung der Ganzkörper-Tastsensorik und des adaptiven Verhaltens als zentrale Roboterfähigkeiten und nicht als optionale Zusatzfunktionen.
Warum adaptive Roboter Aufmerksamkeit erregen
Traditionelle sechsachsige Industrieroboter sind nach wie vor sehr effektiv für wiederholbare Schweiß-, Handhabungs- und Palettieraufgaben, aber sie sind weniger nachsichtig, wenn Werkstücke variieren oder wenn Kontaktkräfte kontinuierlich kontrolliert werden müssen. In diesen Fällen kompensieren Hersteller oft mit teuren Vorrichtungen, vorhergehenden Messungen oder manueller Nachbearbeitung. Die neuen Systeme von Flexiv scheinen darauf ausgelegt zu sein, diese Lücke zu schließen. Berichterstattung von Robotics 24/7 beschrieb Enlight und Mico als einen Schritt der nächsten Generation in der allgemeinen Automatisierung, wobei die Einführung auf die Automate 2026 in Chicago abgestimmt war. Ein separater Bericht von TipRanks stellte fest, dass Flexiv die Veranstaltung nutzte, um reale industrielle Anwendungsfälle für die neuen Plattformen zu präsentieren. Für Produktionsleiter ist das ein Signal, dass die adaptive Robotik von Demonstrationsszenarien zu Anwendungen übergeht, bei denen Zykluszeiten, Betriebszeiten und Prozessfähigkeiten gegen standardisierte industrielle Benchmarks gemessen werden.
Aus technischer Sicht können kraftgesteuerte Robotiksysteme überall relevant sein, wo der Roboter stabilen Kontakt mit einer Oberfläche halten oder Toleranzspielräume kompensieren muss. Dazu gehören Entgraten, Polieren, Klebstoffdosierung, Einfügen und einige Inspektionsaufgaben. In der schweißbezogenen Produktion geht es weniger darum, den Lichtbogenprozess selbst zu ersetzen, sondern vielmehr darum, die umgebenden Abläufe zu verbessern: Teilebeladung, Tack-Verifizierung, Annäherung des Schweißbrenners, Nahtberührungssensorik, Nachbearbeitung und sekundäre Fertigung. Wenn ein Roboter Kontaktbedingungen präziser erkennen kann, kann er eine zuverlässigere Werkzeugverbindung unterstützen und das Risiko von Kollisionen verringern, wenn Teile nicht perfekt positioniert sind. Für Hersteller, die mit Mischmodellproduktion oder kleineren Losgrößen arbeiten, könnte das die Flexibilität verbessern, ohne die Linie vollständig neu gestalten zu müssen.
Auswirkungen auf Standards, Sicherheit und Implementierung
Jede Bewegung hin zu adaptiver oder kollaborativer Automatisierung muss weiterhin in die etablierten Maschinen- und Roboter-Sicherheitsrahmen passen. Für europäische Implementierungen werden Integratoren weiterhin Systeme anhand der Übergangsvorschriften der Maschinenrichtlinie und harmonisierter Praktiken, die mit ISO 10218 für Industrieroboter, ISO/TS 15066 für kollaborative Anwendungen und relevanten IEC und EN elektrischen und sicherheitstechnischen Normen wie IEC 60204-1 und EN ISO 13849-1 verknüpft sind, bewerten, wo dies zutrifft. Kraftempfindlichkeit oder taktile Sensorik beseitigt nicht die Notwendigkeit einer formalen Risikobewertung; sie verändert die verfügbaren Designoptionen. Ein Roboter, der Kontakt erkennen und Kraft regulieren kann, könnte weniger belastende Interaktionsstrategien ermöglichen, aber Schweißzellen bringen weiterhin Gefahren durch Lichtbogenstrahlung, Spritzer, Dämpfe, heiße Teile und scharfe Kanten mit sich. Das bedeutet, dass kollaborative Ansprüche auf Anwendungsebene bewertet werden müssen und nicht nur von der Roboterplattform allein angenommen werden dürfen.
Es gibt auch eine Integrationsfrage hinsichtlich der Softwarereife und der Unterstützung des Ökosystems. Käufer, die Flexiv mit ABB OmniCore-basierten Zellen, KUKA iiQKA-Implementierungen, FANUC Lichtbogenschweißpaketen, Yaskawa Motoman-Schweißsystemen, Universal Robots Cobot-Integrationen oder Doosan-kollaborativen Plattformen vergleichen, werden über die Armhardware hinaus schauen. Sie werden nach Offline-Programmierung, Feldbuskompatibilität, Vision-Integration, Schnittstellen für Schweißstromquellen, Verfügbarkeit von Ersatzteilen und regionaler Serviceabdeckung fragen. Adaptive Roboter könnten einige mechanische Komplexität in einer Zelle reduzieren, aber sie könnten die Anforderungen an Prozessvalidierung, Sensorkalibrierung und Anwendungsengineering erhöhen. Für Tier-1-Automobil- und regulierte Fertigungsumgebungen wird dieser Kompromiss sorgfältig bewertet werden.
Was das für Schweißzellen-Integratoren bedeutet
Für Integratoren von robotergestütztem Schweißen und Cobot-Schweißen ist die Einführung von Flexiv besonders relevant in Anwendungen, in denen Teilevariationen die Wirtschaftlichkeit der Automatisierung eingeschränkt haben. In einer konventionellen MIG/MAG- oder TIG-Schweißzelle wird Wiederholgenauigkeit normalerweise durch starre Vorrichtungen, genaue Bezugssysteme und eng kontrollierte Teileversorgung erreicht. Adaptive Roboter bieten einen weiteren Weg: die Verwendung von kraftbewusster Bewegung und taktilem Feedback, um moderate Variationen zu tolerieren, kontaktbasierte Routinen zu leiten oder angrenzende manuelle Aufgaben zu automatisieren, die mit rein positionsgesteuerten Robotern schwierig sind. Dies beseitigt nicht die Notwendigkeit für Nahtverfolgung, Schweißverfahrenqualifizierung oder stabile Brennerorientierung, aber es könnte Integratoren helfen, Zellen mit weniger Übervorrichtungen und schnelleren Umstellungen für die Hochmixproduktion zu entwerfen. KMUs, die Rahmen, Halterungen, Gehäuse oder Rohrbaugruppen herstellen, könnten dies besonders relevant finden, wenn die Losgrößen eine vollständig maßgeschneiderte harte Automatisierung nicht rechtfertigen.
Es gibt praktische Grenzen. Lichtbogenschweißen erfordert weiterhin Prozesskonstanz, Schutzgassteuerung, Drahtzufuhrstabilität und vorhersehbaren Zugang zu Verbindungen. Adaptive Manipulation wird keine mangelhafte Gelenkvorbereitung oder übermäßigen Maßdrift kompensieren. Dennoch könnte die Kombination aus siebenachsiger Reichweite, Dual-Arm-Handhabung und Kraftkontrolle hybride Zellkonzepte unterstützen: ein Roboter oder Arm für nachgiebige Beladung und Ausrichtung, ein anderer für Schweißen oder Nachbearbeitung, mit gemeinsamer Sensorik und koordinierter Teilehandhabung. Diese Architektur könnte häufiger werden, da Hersteller nicht nur die Schweißnaht, sondern den gesamten Materialfluss darum herum automatisieren möchten.
Hersteller, die neue robotergestützte Schweißzellen, Cobot-Schweißstationen oder adaptive Handhabungskonzepte evaluieren, können Entwicklungen wie die von Flexiv als Benchmark für zukünftige Zellgestaltungen nutzen. Unternehmen, die kraftgesteuerte Plattformen mit etablierter Schweißautomatisierung von ABB, KUKA, FANUC, Yaskawa, Universal Robots oder Doosan vergleichen möchten, können ein Angebot anfordern, um die Machbarkeit, Sicherheitsanforderungen und Integrationskosten für ihre spezifischen Teile und Produktionsvolumina zu bewerten.
Related articles
Angebot anfordern
Suchen Sie eine bestimmte Konfiguration oder möchten Sie über unseren aktuellen Bestand sprechen? Erzählen Sie uns von Ihrem Projekt — wir antworten innerhalb von 24 Stunden aus unserem Büro in Bilbao.