RealSense D585 Pro verbessert die Tiefenwahrnehmung für Robotzellen
Die neue D585 Pro Tiefenkamera von RealSense bietet eine höhere Tiefenqualität und Edge-AI-Funktionen, die die robotergestützte Inspektion, Nahtverfolgung und Teilehandhabung in automatisierten Schweißzellen verbessern könnten.
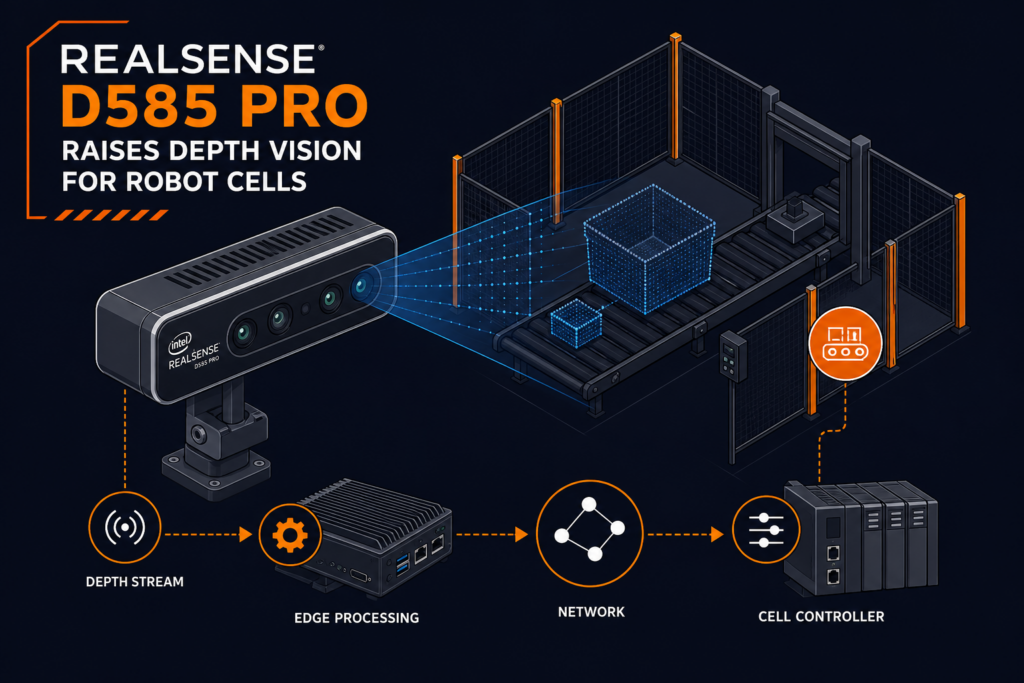
RealSense hat die D585 Pro vorgestellt, eine neue KI-native Tiefenkamera, die für Robotik und industrielle Automatisierung konzipiert ist. Das Unternehmen gibt an, dass sie mehr als doppelt so hohe Tiefenqualität wie die vorherige Generation bietet. Der Launch, der zuerst von The Robot Report gemeldet wurde, ist über mobile Roboter und Bin-Picking hinaus relevant: Für die Schweißautomatisierung können bessere Tiefendaten die Teilelokalisierung, das Finden von Nähten, den Torch-Ansatz und die Qualitätskontrollen nach dem Schweißen direkt beeinflussen. Laut Business Wire wird die D585 Pro vom neuen RealSense Vision Processor V5 betrieben und kombiniert Tiefensensing, Edge-AI-Beschleunigung und eine softwaredefinierte Architektur. RealSense beschreibt das Produkt auch als Teil eines umfassenderen Vorstoßes in Richtung „KI-native Vision“ für Roboter auf ihrer offiziellen Webseite, wo die D585 neben Perception Studio für physische KI-Workflows präsentiert wird, wie von RealSense erwähnt.
Für industrielle Anwender ist die Bedeutung weniger eine Frage der Schlagwort-KI-Terminologie, sondern vielmehr, ob eine Kamera stabile, wiederholbare Tiefendaten unter Fabrikbedingungen aufrechterhalten kann. Schweißumgebungen sind für Sichtsysteme schwierig, da sie reflektierende Metalloberflächen, variable Teilegeometrien, Rauch, Spritzer und wechselnde Umgebungslichtverhältnisse kombinieren. Eine Kamera, die eine höhere Tiefenqualität und eine breitere Betriebsabdeckung beansprucht, kann daher in den vorgelagerten und nachgelagerten Aufgaben rund um das Schweißen nützlich sein, auch wenn sie nicht direkt im Lichtbogenbereich montiert ist. In Robotzellen, die um ABB-, KUKA-, FANUC-, Yaskawa-, Universal Robots- oder Doosan-Plattformen aufgebaut sind, wird 3D-Vision zunehmend für die Überprüfung der Teilepräsenz, die Toleranzkompensation von Vorrichtungen, die Roboterführung und die dimensionale Inspektion eingesetzt. Das Wertversprechen der D585 Pro scheint zu sein, dass eine Kameraplattform sowohl Nahbereichsgenauigkeit als auch Fernwahrnehmung bei höheren Bildraten abdecken kann, was möglicherweise die Notwendigkeit verringert, mehrere Sensoren in einer einzigen Zellarchitektur zu mischen.
Höhere Tiefendatenqualität für die industrielle Robotik
Die technische Behauptung, die die meiste Aufmerksamkeit auf sich zieht, ist die berichtete Verbesserung der Tiefenqualität im Vergleich zu früheren RealSense-Modellen. In praktischen Fertigungsbegriffen kann das dichtere Punktwolken, weniger ungültige Pixel und stabilere Kantendefinitionen an komplexen Metallteilen bedeuten. Diese Faktoren sind wichtig, wenn Roboter Flanschpositionen identifizieren, Lücken erkennen oder überprüfen müssen, ob ein Bauteil korrekt sitzt, bevor ein Schweißzyklus beginnt. Business Wire gibt an, dass die D585 Pro darauf abzielt, den Robotik- und industriellen Vision-Stack mit Nahbereichsgenauigkeit, Fernabdeckung, hoher Bildrate und Innen-/Außenleistung zu überbrücken. Wenn diese Behauptungen in der Anwendung zutreffen, könnte die Kamera für Anwendungen wie das Laden von Paletten in Vorrichtungen, die Ausrichtung von Bauteilen vor dem Schweißen und die End-of-Line-Inspektion geeignet sein, wo eine einzige Sensorplattform die Integration vereinfacht.
Es gibt auch einen breiteren Trend hinter diesem Launch. Vision-Anbieter verlagern die Verarbeitung näher an den Sensor, indem sie dedizierte System-on-Chip-Designs verwenden, um die Latenz zu reduzieren und Wahrnehmungsaufgaben vom Robotercontroller oder industriellen PC zu entlasten. Dieser Ansatz entspricht den Bedürfnissen moderner Zellen, in denen Maschinenvision, KI-Inferenz und Roboterbewegungsplanung zunehmend in Echtzeit interagieren. Für die Schweißautomatisierung müssen Integratoren jedoch weiterhin validieren, wie sich jede Tiefenkamera im Umfeld von Lichtbogenblitzen, heißen Oberflächen und metallischer Reflektivität verhält. Die Einhaltung des breiteren Maschinen-Sicherheitsrahmens bleibt unabhängig von der Kameraleistung selbst, sodass die Implementierung in Europa weiterhin im Kontext von ISO 10218 für Industrieroboter, ISO/TS 15066 für kollaborative Anwendungen und relevanten IEC und EN elektrischen und maschinenbaulichen Anforderungen, einschließlich der funktionalen Sicherheitsanforderungen, die üblicherweise im Zellendesign angewendet werden, bewertet werden muss.
Warum die Bildqualität in der Schweißautomatisierung wichtig ist
Automatisierte Schweißzellen hängen oft von einer Kette von Wahrnehmungsschritten ab, bevor die Flamme überhaupt entzündet wird. Ein Bauteil kann mit dimensionalen Abweichungen aus dem Schneiden, Stanzen oder Taktmontage ankommen; Vorrichtungen können begrenzte Bewegungen zulassen; und die Produktion von Mischmodellen kann erfordern, dass der Roboter identifiziert, welche Bauteilversion vorhanden ist. In diesen Szenarien unterstützen Tiefenkameras Lokalisierungs- und Verifikationsaufgaben, die Ausschuss und ungeplante Stopps reduzieren. Sie können auch das Lasernahtverfolgen oder 2D-Kameras ergänzen, anstatt sie zu ersetzen. Zum Beispiel kann ein 3D-Tiefensensor die Bauteilpose und den Zustand der Lücke vor dem Schweißen bestätigen, während ein dedizierter Nahtsensor die endgültige Pfadkorrektur an der Verbindung übernimmt. Eine bessere Tiefenqualität kann die Zuverlässigkeit dieser ersten Phase verbessern, insbesondere in der Hochmix- und Niedervolumenproduktion, wo harte Werkzeuge allein nicht ausreichen.
Dies ist besonders relevant für KMUs, die Cobot-Schweißen übernehmen. Kollaborative Systeme von Universal Robots oder Doosan werden oft wegen ihrer Flexibilität ausgewählt, aber diese Flexibilität hängt von der Wahrnehmung ab, wenn Bediener zwischen Bauteilfamilien wechseln oder wenn Vorrichtungen vereinfacht werden, um Kosten zu senken. Eine leistungsfähigere Tiefenkamera kann schnellere Umstellungen und eine wiederholbare Validierung der Einrichtung unterstützen. In größeren Automobil- oder Tier-1-Umgebungen, die ABB-, FANUC-, KUKA- oder Yaskawa-Roboter verwenden, gilt dasselbe Prinzip bei höherem Durchsatz: Wenn die Vision Fehlbeladungen reduziert, die Rückverfolgbarkeit verbessert oder automatisierte Qualitätskontrollen ermöglicht, trägt sie zur Gesamteffektivität der Geräte bei. Die Herausforderung besteht immer in der Integrationsdisziplin – die Platzierung der Kamera, Abschirmung, Kalibrierungsstrategie, Netzwerkarchitektur und Software-Schnittstellen bestimmen, ob die theoretische Sensorleistung in stabile Produktionsergebnisse umgesetzt werden kann.
Was das für Integratoren von Schweißzellen bedeutet
Für Integratoren von Schweißzellen sollte die D585 Pro eher als eine weitere Option im wachsenden Werkzeugkasten für 3D-Wahrnehmung betrachtet werden, als als universeller Ersatz für etablierte Schweißsensor-Technologien. Ihre stärksten Anwendungsfälle werden wahrscheinlich Design von robotergestützten Schweißzellen rund um die Teileerkennung, den Transfer von Behältern zu Vorrichtungen, die Vorabverifizierung vor dem Schweißen und die Nachbearbeitungsinspektion sein, insbesondere wenn Integratoren die Sensorik und die Edge-Verarbeitung konsolidieren möchten. In Cobot-Schweißzellen kann eine kompakte KI-native Tiefenkamera helfen, die Implementierung zu vereinfachen, wenn der Platzbedarf, die Kapazität des Controllers und die Ingenieurzeit begrenzt sind. In größeren schlüsselfertigen Systemen könnte sie digitale Zwillingsaktualisierungen, adaptive Spannlogik oder automatisierte Qualitätsdokumentation unterstützen. Integratoren sollten sie dennoch an anwendungsspezifischen Anforderungen wie Mindestmerkmalsgröße, Zykluszeit, Toleranzstapelung, Schutz gegen Eindringen und Widerstand gegen Kontamination benchmarken. Sie sollten auch die Interoperabilität mit SPS, industriellen PCs und Roboter-Ökosystemen von ABB, KUKA, FANUC, Yaskawa, Universal Robots und Doosan sowie die Erwartungen an Cybersicherheit und Softwarewartung über den Lebenszyklus der Zelle überprüfen.
Die breitere Erkenntnis ist, dass die Tiefenwahrnehmung in der Schweißautomatisierung immer zentraler wird, da Hersteller auf eine höhere Mischung, weniger Ausschuss und eine nachvollziehbarere Qualitätskontrolle drängen. Eine Kamera, die die Tiefenwahrnehmung verbessert, kann messbare nachgelagerte Effekte haben, wenn sie falsche Erkennungen reduziert, die Roboterführung verbessert oder Einrichtungsfehler erkennt, bevor das Schweißen beginnt. Für Hersteller, die neue robotergestützte Schweiß- oder Cobot-Schweißprojekte evaluieren, ist diese Art der Sensorentwicklung wert, im Zusammenhang mit der Wahl der Energiequelle, der Reinigung des Brenners und der Sicherheitstechnologie verfolgt zu werden.
Unternehmen, die eine neue Schweißzelle planen oder eine bestehende robotergestützte Schweißlinie aufrüsten möchten, können ein Angebot anfordern, um zu bewerten, wie 3D-Vision, Nahtverfolgung und Zellendesignoptionen ihren Produktionsanforderungen entsprechen.
Related articles

Angebot anfordern
Suchen Sie eine bestimmte Konfiguration oder möchten Sie über unseren aktuellen Bestand sprechen? Erzählen Sie uns von Ihrem Projekt — wir antworten innerhalb von 24 Stunden aus unserem Büro in Bilbao.