GMSL-Vision-Ökosysteme gewinnen an Bedeutung im Roboterschweißen
Robotische Vision entwickelt sich von einer optionalen Ergänzung zu einer zentralen Automatisierungsschicht. GMSL-basierte Kamerasysteme könnten die Bereitstellung vereinfachen, die Schweißqualität verbessern und eine schnellere Integration von Schweißzellen unterstützen.
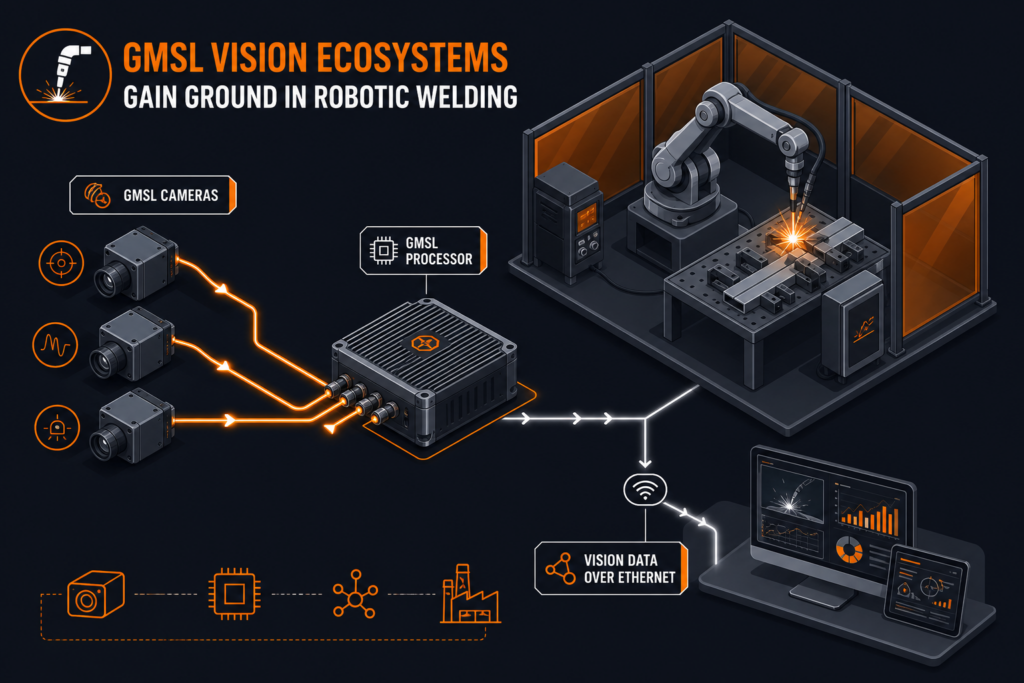
Robotische Vision wird zu einer zentralen Schlüsseltechnologie für die industrielle Automatisierung, insbesondere dort, wo Roboter in dynamischen, hochvariablen Produktionsumgebungen arbeiten müssen. Der ursprüngliche Artikel, veröffentlicht von The Robot Report, hebt hervor, wie GMSL, oder Gigabit Multimedia Serial Link, als praktische Möglichkeit an Bedeutung gewinnt, Kameras und Verarbeitungshardware in der Robotik zu verbinden. Dieser Wandel ist für die Fertigung von Bedeutung, da Vision nicht mehr nur auf einfache Präsenzdetektion oder Inspektion an festen Positionen beschränkt ist. In Schweißzellen unterstützt die Vision zunehmend die Teilelokalisierung, Nahtverfolgung, Brennerführung, Vorrichtungsüberprüfung, Nachschweißinspektion und eine sicherere Mensch-Roboter-Kollaboration. Da die Hersteller kürzere Umrüstzeiten und eine bessere Rückverfolgbarkeit anstreben, kann die Qualität der Kamera-Schnittstelle und die Reife des umgebenden Ökosystems direkt die Bereitstellungszeit, Zuverlässigkeit und Gesamtsystemkosten beeinflussen.
Warum GMSL in der Robotik Aufmerksamkeit erregt
GMSL wurde für Hochgeschwindigkeitskamera- und Displayverbindungen entwickelt, zunächst in Automobilanwendungen, wird jedoch jetzt für Robotik und industrielle Systeme angepasst. Laut Analog Devices kann der Ansatz den Entwicklungsaufwand reduzieren, indem er den Robotikteams Zugang zu vorvalidierten Kameramodulen, Adaptern und Softwareunterstützungspaketen bietet, anstatt eine maßgeschneiderte Integration auf niedriger Ebene für jeden Sensor zu erfordern. EDN weist auch darauf hin, dass dieses Ökosystemmodell die Entwicklungszyklen verkürzen und die Barriere zwischen Prototyp- und Produktionsbereitstellung senken kann. Für industrielle Anwender ist das relevant, da Maschinenvisionsprojekte oft nicht nur an der Bildqualität scheitern, sondern auch an der Robustheit der Kabel, Synchronisation, Latenz, elektromagnetischer Verträglichkeit und der Softwareintegration mit Robotersteuerungen und SPS.
Praktisch gesehen kann eine robuste Hochbandbreitenkamera-Verbindung mehrere synchronisierte Sensoren, längere Kabelstrecken und kompakte Edge-Processing-Architekturen unterstützen. Diese Eigenschaften sind in der Roboterschweißtechnik nützlich, wo Kameras am Arm, in der Nähe des Brenners oder um den Zellumfang zur Inspektion und sicherheitsrelevanten Überwachung montiert werden können. Schweißumgebungen sind besonders anspruchsvoll aufgrund von Lichtbogenblitzen, Spritzern, Rauch, Vibrationen und reflektierenden Metalloberflächen. Die Vision-Hardware benötigt daher nicht nur ausreichenden Datendurchsatz, sondern auch vorhersehbare Leistung unter industriellen Bedingungen. Für Integratoren, die mit Plattformen von ABB, KUKA, FANUC, Yaskawa, Universal Robots oder Doosan arbeiten, liegt der Wert eines breiteren Vision-Ökosystems darin, die Menge an maßgeschneiderter Ingenieursarbeit zu reduzieren, die erforderlich ist, um Sensoren, Rechenhardware, Feldbuskommunikation und Roboterbewegung konsistent zusammenarbeiten zu lassen.
Von Punkt-zu-Punkt-Bewegung zu adaptiver Fertigung
Der breitere Trend hinter der GMSL-Diskussion besteht darin, dass von Robotern erwartet wird, dass sie mehr tun als nur feste Trajektorien zu wiederholen. Hersteller erwarten zunehmend, dass robotische Systeme Teilevariationen identifizieren, Vorrichtungstoleranzen ausgleichen und die Prozessqualität ohne umfangreiche manuelle Eingriffe aufrechterhalten. Im Schweißen bedeutet dies Anwendungen wie das Lokalisieren von gestanzten oder bearbeiteten Teilen vor dem Heften, das Anpassen von Wegen bei dimensionalen Abweichungen und das Überprüfen der Nahtgeometrie nach dem Prozess. Diese Fähigkeiten sind besonders relevant in der Automobilproduktion auf Tier-1-Ebene, der allgemeinen Metallverarbeitung und in kleinen und mittleren Unternehmen (KMU), die gemischte Chargen bearbeiten. Vision kann auch digitale Qualitätsaufzeichnungen unterstützen, indem Bilder oder Messdaten mit Teile-IDs verknüpft werden, was für die Einhaltung von Vorschriften und Kundenprüfungen nützlich ist.
Diese Entwicklung steht im Einklang mit den breiteren industriellen Anforderungen an Sicherheit und Maschinendesign. Vision-ausgestattete Roboterschweißzellen müssen weiterhin im Rahmen der geltenden Normen entwickelt werden, einschließlich ISO 10218 für die Sicherheit von Industrierobotern, ISO/TS 15066 für kollaborative Roboteranwendungen und Maschinen-Sicherheitsanforderungen gemäß den IEC und EN Familien wie IEC 60204-1 und EN ISO 13849-1, wo die Leistungsniveaus von Steuerungssystemen relevant sind. Wenn Vision zur Führung, Inspektion oder kollaborativen Operation verwendet wird, müssen Integratoren klar zwischen Prozessvision und sicherheitsrelevanten Sensoren unterscheiden. Eine Hochleistungs-Kamera-Verbindung kann die Prozesskontrolle verbessern, macht jedoch ein System nicht automatisch sicherheitskonform. Diese Unterscheidung ist entscheidend in Schweißzellen, in denen Lichtbogenrisiken, Rauchabsaugung, Schutzvorrichtungen und der Zugang für Bediener koordinierte Designentscheidungen erfordern.
Was das für Schweißzellen-Integratoren bedeutet
Für Schweißzellen-Integratoren deutet das wachsende Ökosystem rund um die robotische Vision auf einen modulareren Ansatz zur Bereitstellung adaptiver Automatisierung hin. Anstatt Vision als maßgeschneidertes Subsystem zu behandeln, das spät im Projekt hinzugefügt wird, können Integratoren sie zunehmend als Teil der Basisarchitektur der Zelle spezifizieren. In robotischen MIG/MAG-, TIG-, Laser- oder Punktschweißanwendungen kann das bedeuten, 2D- oder 3D-Kameras mit Nahtfindung, Teilepräsenzprüfungen und Qualitätsinspektionen in einem einzigen Engineering-Workflow zu kombinieren. Ein standardisiertes Kamerasystem kann auch die Unterstützung für mehrere Roboter-Marken vereinfachen, insbesondere in Einrichtungen, die gemischte Flotten von ABB, KUKA, FANUC, Yaskawa, Universal Robots und Doosan betreiben. Für Systembauer kann dies das Inbetriebnahme-Risiko verringern und die Verwaltung von Ersatzteilen, Softwarewartung und zukünftigen Upgrades erleichtern.
Die Auswirkungen sind am stärksten in der hochvariablen, niedrigvolumigen Produktion, wo konventionelle starre Automatisierung wirtschaftlich Schwierigkeiten hat, Teilevariationen zu bewältigen. Cobot-Schweißzellen können insbesondere von einer leichter zu integrierenden Vision profitieren, da sie oft in KMUs ohne große interne Automatisierungsteams eingesetzt werden. Wenn Kameramodule, Rechenplattformen und Treiber bereits innerhalb eines bekannten Ökosystems validiert sind, können Ingenieursressourcen auf Prozessoptimierung, Entwicklung von Schweißparametern und Vorrichtungsdesign anstatt auf die grundlegende Sensorintegration verschoben werden. Das beseitigt nicht die Notwendigkeit für Anwendungsexpertise: Das Verhalten des Schweißbades, die Zugänglichkeit der Fugen, die Zykluszeitbeschränkungen und das Management des Schutzgases bestimmen weiterhin, ob ein visionär geführtes Konzept eine stabile Produktion liefern kann. Aber es verbessert die Chancen, dass Vision wiederholt über mehrere Zellen und Standorte hinweg eingesetzt werden kann.
Industrielle Akzeptanz wird von Integrationsdisziplin abhängen
Selbst mit einem stärkeren Ökosystem wird die Akzeptanz in der Schweiß- und Metallverarbeitung von einer disziplinierten Implementierung abhängen. Die Platzierung der Kamera, der Schutz der Linse, die Beleuchtungsstrategie und die Datenverarbeitung müssen auf den Schweißprozess und die erwarteten Teile-Toleranzen abgestimmt werden. Integratoren müssen auch die Netzwerkarchitektur, die Edge-Computing-Belastung und die Interoperabilität mit MES oder Qualitätssystemen berücksichtigen. Die Attraktivität von GMSL-basierter Vision besteht nicht nur in einer höheren Bandbreite; es ist die Möglichkeit, wiederholbare, unterstützbare Maschinenarchitekturen zu schaffen, die schneller von der Idee zur Produktion übergehen. Für Produktionsleiter und Beschaffungsteams kann das in kürzere Inbetriebnahmezeiten und vorhersehbarere Lebenszykluskosten bei der Spezifikation neuer Schweißzellen oder Nachrüstungen übersetzt werden.
Unternehmen, die robotisches Schweißen, Cobot-Schweißen oder visionär geführte Zell-Upgrades bewerten, sollten prüfen, wie Kamerasystemarchitektur, Normen-Konformität und Roboter-Markenkompatibilität in der Entwurfsphase behandelt werden. Leser, die eine neue Schweißzelle oder Nachrüstung planen, können ein Angebot anfordern, um die technische und wirtschaftliche Eignung für ihre Anwendung zu bewerten.
Related articles

Angebot anfordern
Suchen Sie eine bestimmte Konfiguration oder möchten Sie über unseren aktuellen Bestand sprechen? Erzählen Sie uns von Ihrem Projekt — wir antworten innerhalb von 24 Stunden aus unserem Büro in Bilbao.