RealSense D585 bringt smartere 3D-Vision für Roboter
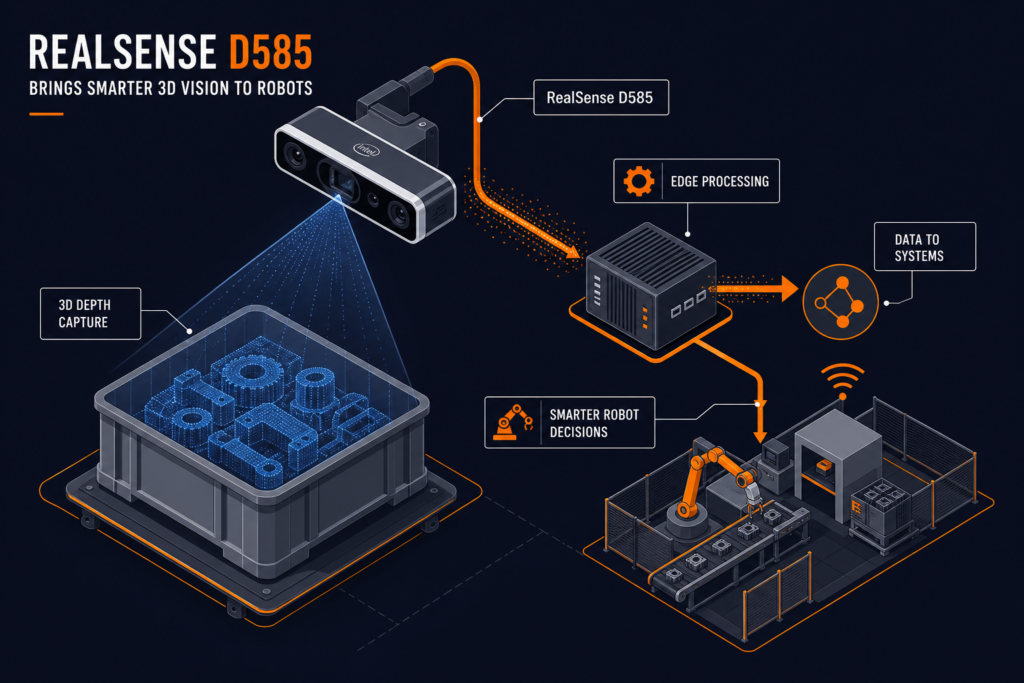
Die neue D585-Tiefenkamera von RealSense kombiniert KI auf dem Gerät, eine Reichweite von 20 m und Nahbereichssensorik, mit Auswirkungen auf robotergestütztes Schweißen, Nahtverfolgung und flexible Zellenautomatisierung.
RealSense D585 erweitert die Rolle der 3D-Vision in der Robotik
RealSense hat die D585-Tiefenkamera als neue 3D-Vision-Plattform für die Robotik eingeführt, mit einer Spezifikation, die direkt für die industrielle Automatisierung relevant ist. Wie zuerst von Hackster.io berichtet, kombiniert das Gerät Tiefensensorik mit KI-Verarbeitung auf dem Chip, um die Menge an Bildverarbeitung zu reduzieren, die anderswo im System durchgeführt werden muss. Laut den Produktinformationen, die von RealSense veröffentlicht wurden, unterstützt die Kamera Tiefenmessungen aus einer Entfernung von bis zu 10 cm, erreicht über 20 m, arbeitet mit bis zu 60 fps bei voller Auflösung und bietet ein Sichtfeld von 120 x 100 Grad. Für Produktionsumgebungen ist diese Kombination wichtig, da sie gleichzeitig zwei hartnäckige Einschränkungen anspricht: die Notwendigkeit, Teile und Kanten im Nahbereich zu erkennen, und die Notwendigkeit, situative Wahrnehmung über größere Arbeitsbereiche, Förderbänder, Vorrichtungen oder mobile Plattformen aufrechtzuerhalten.
Aus der Perspektive der Fertigung geht es bei der D585 weniger um die Wahrnehmung im Verbraucherstil und mehr darum, maschinelles Sehen in praktischen Roboterzellen einfacher zu implementieren. Integratoren stehen oft vor einem Kompromiss zwischen hochleistungsfähiger 3D-Sensorik und Systemkomplexität. Wenn mehr Verarbeitung auf dem Gerät ausgeführt werden kann, kann die Belastung des Robotercontrollers, des Industrie-PCs oder des Edge-Computers verringert werden. Das kann die Architektur in Zellen vereinfachen, die um Plattformen von ABB, KUKA, FANUC, Yaskawa, Universal Robots oder Doosan aufgebaut sind, insbesondere wenn Vision mit PLC-Logik, Sicherheitsgeräten, Schweißstromquellen und HMI-Funktionen koexistieren muss. In gemischten Automatisierungslinien kann eine Kamera, die Objektlokalisierung, Inspektion und Roboterführung ohne übermäßigen Rechenaufwand unterstützt, die Inbetriebnahmezeit verkürzen und die Anzahl der Schnittstellen reduzieren, die validiert werden müssen.
Warum Tiefenqualität und Edge-AI auf der Werkbank wichtig sind
Die technische Bedeutung der D585 liegt in der Art und Weise, wie sie Sensorik und Verarbeitung kombiniert. RealSense positioniert das Produkt als eine KI-native Vision-Plattform und nicht als einfaches Kamera-Update, und die späteren Produktkommunikationen des Unternehmens zur D585-Familie deuten auf einen breiteren Trend zu softwaredefinierter Wahrnehmung für die Robotik hin. Berichterstattung von The Robot Report hebt die gleiche Richtung hervor: Tiefensensorik, Edge-AI-Beschleunigung und eine Plattform, die darauf abzielt, die Softwarefähigkeiten zu verbessern. Für industrielle Anwender kann dieser Ansatz stabilere Erkennung unter variablen Lichtverhältnissen, reflektierenden Oberflächen oder sich ändernden Teilepräsentationen unterstützen, obwohl die tatsächliche Leistung weiterhin von Kalibrierung, Montage, Abschirmung und Anwendungsanpassung abhängt.
Im Schweißen und in der Metallbearbeitung bleibt die 3D-Vision herausfordernd, da die Umgebung selten sauber oder statisch ist. Vorrichtungen variieren, Heftschweißnähte verzerren die Geometrie, und Spritzer, Rauch und Lichtbogenlicht können optische Systeme stören. Eine Kamera mit besserer Nahbereichsleistung kann nützlich sein für die Teilefindung vor dem Schweißen, die Spaltmessung, das Bin-Picking von Rohlingen, die Überprüfung des Annäherns des Schweißbrenners und die Nachschweißinspektion. Das breitere Sichtfeld hat auch praktischen Wert in größeren Zellen, in denen ein einzelner Sensor möglicherweise einen Tisch, einen Positionierer oder eine Übergabenzone überwachen muss. Integratoren müssen jedoch weiterhin bewerten, ob die Kamera vor der Lichtbogenzündung, während des Schweißens oder nach dem Prozess verwendet wird, da jede Phase unterschiedliche optische und thermische Bedingungen schafft. In vielen Fällen ergänzen 3D-Tiefenkameras eher als dass sie spezielle Lasernahtverfolgungssysteme ersetzen.
Was das für Schweißzellenintegratoren bedeutet
Für Designer von robotergestützten Schweißzellen weist die D585 auf einen breiteren Trend hin: Mehr Wahrnehmung rückt näher an den Sensor, was die Art und Weise ändern kann, wie Zellen konstruiert werden. In der konventionellen Lichtbogenschweißautomatisierung werden Nahtverfolgung und Teilelokalisierung oft von separaten Teilsystemen behandelt. Eine 3D-Kamera mit Onboard-Verarbeitung könnte vorgelagerte Aufgaben wie die Erkennung der Teilepräsenz, die Überprüfung der Vorrichtung, die Orientierungsprüfungen und die adaptive Pfadauswahl unterstützen, bevor der Roboter mit dem Schweißen beginnt. Das ist besonders relevant in der Hochmix-, Niedervolumenfertigung, wo cobot-Schweißen und flexible Roboterzellen erwartet werden, die mit variabler Teilegeometrie und kürzeren Rüstzeiten umgehen. Integratoren, die mit ABB OmniCore, KUKA KR C5, FANUC R-30iB, Yaskawa Motoman, Universal Robots e-Series oder Doosan-Kollaborationsplattformen arbeiten, könnten den Wert erkennen, eine gemeinsame Visionsebene über Lade-, Handhabungs- und Schweißvorbereitungsschritte hinweg zu nutzen.
Es gibt auch Standards und Compliance-Überlegungen. Jede visiongeführte Schweißzelle muss als vollständige Maschine oder Montage bewertet werden, nicht isoliert als Kamera. Abhängig von der Architektur können relevante Rahmenbedingungen ISO 10218 für die Sicherheit von Industrierobotern, ISO/TS 15066 für kollaborative Anwendungen, IEC 60204-1 für elektrische Ausrüstungen von Maschinen und EN ISO 13849-1 für sicherheitsbezogene Steuerungssysteme umfassen. Wo Kameras die Roboterbewegung oder die Interaktion mit dem Bediener beeinflussen, muss die Unterscheidung zwischen Prozess- und Sicherheitswahrnehmung klar bleiben. Eine Tiefenkamera, die zur Führung verwendet wird, qualifiziert sich nicht automatisch als sicherheitsbewertetes Schutzgerät. Für Integratoren bedeutet das, dass die D585 zwar die Wahrnehmung und Anpassungsfähigkeit verbessern kann, jedoch die Notwendigkeit für validierte Sicherheitsvorkehrungen, Risikobewertungen und funktionale Sicherheitsdesigns nicht beseitigt.
Auswirkungen auf flexible Automatisierung und Beschaffung
Für Produktionsleiter und Beschaffungsteams ist die praktische Frage, ob verbesserte 3D-Vision Ausfallzeiten, manuelle Nachbearbeitung und Abhängigkeit von Vorrichtungen reduzieren kann. In Schweißbetrieben kann eine bessere Teilelokalisierung helfen, um vorgelagerte Variationen bei geschnittenen Teilen, geformten Baugruppen oder manuell geladenen Vorrichtungen auszugleichen. Das kann sich in weniger Roboterbahnversätzen, weniger Nacharbeit und stabileren Zykluszeiten niederschlagen, insbesondere wenn Zellen zwischen Produktvarianten umschalten müssen. Das Reichweiten- und Bildfrequenzprofil der D585 deutet darauf hin, dass sie auch über feste Schweißstationen hinaus relevant sein könnte, einschließlich mobiler Roboter, Inspektionsstationen und Materialhandhabungszellen, die Schweißlinien speisen. Der stärkste Geschäftsnutzen wird wahrscheinlich dort auftreten, wo eine Sensorplattform mehrere Aufgaben entlang der Prozesskette unterstützen kann, anstatt als einzweckmäßiges Add-On zu dienen.
Die Akzeptanz hängt weiterhin von Integrationsaufwand, Softwareunterstützung und Robustheit unter rauen industriellen Bedingungen ab. Käufer werden Beweise für Wiederholbarkeit, Latenz, Umweltverträglichkeit und Kompatibilität mit bestehender Middleware, Roboter-Schnittstellen und MES- oder Qualitätssystemen verlangen. Für Schweißanwendungen werden sie auch fragen, wie sich die Kamera in der Nähe von reflektierenden Metallen, dunklen Oberflächen und wechselndem Umgebungslicht verhält. Diese Fragen sind typisch für jede neue Vision-Komponente, die in die Produktion eingeführt wird. Dennoch zeigt die D585, dass 3D-Sensorik sich in Richtung kompakterer, intelligenterer und besser einsetzbarer Architekturen bewegt, was für Hersteller relevant ist, die versuchen, robotergestützte Schweißzellen anpassungsfähiger zu gestalten, ohne die Steuerungen zu komplizieren.
Unternehmen, die robotergestütztes Schweißen, cobot-Schweißen oder visiongeführte Zell-Upgrades evaluieren, können ein Angebot anfordern, um zu bewerten, wie 3D-Sensorik, Nahtverfolgung und Zellendesign-Entscheidungen in ihren Produktionsmix, Sicherheitsanforderungen und Schweißqualitätsziele passen.
Related articles
Angebot anfordern
Suchen Sie eine bestimmte Konfiguration oder möchten Sie über unseren aktuellen Bestand sprechen? Erzählen Sie uns von Ihrem Projekt — wir antworten innerhalb von 24 Stunden aus unserem Büro in Bilbao.