RealSense D585 Pro Raises Depth Vision for Robot Cells
RealSense’s new D585 Pro depth camera brings higher depth quality and edge AI features that could improve robotic inspection, seam tracking and part handling in automated welding cells.
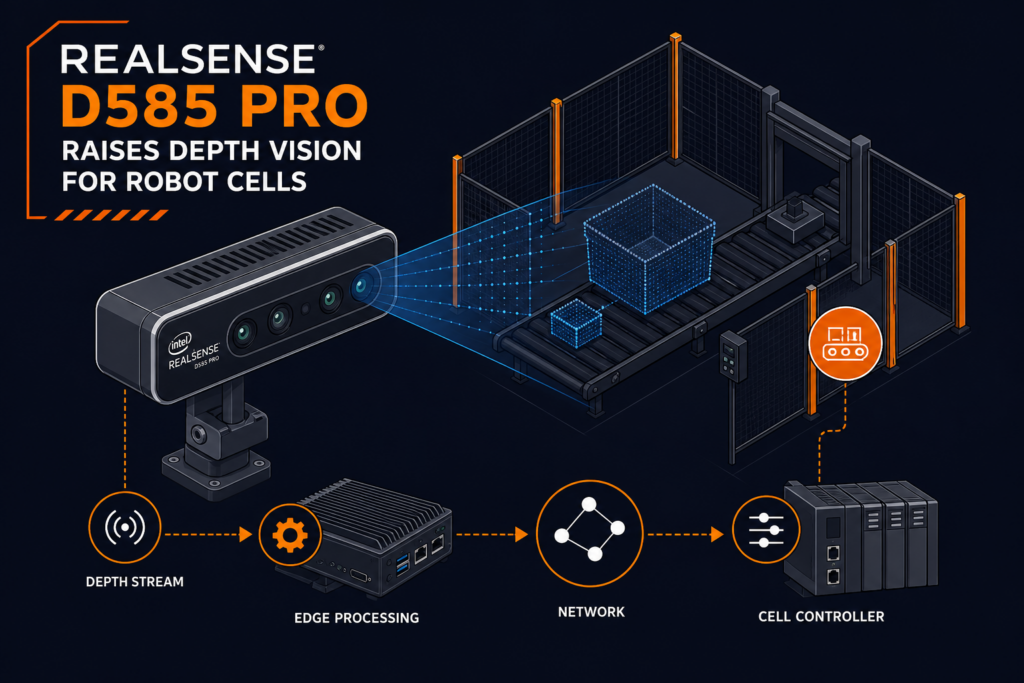
RealSense has introduced the D585 Pro, a new AI-native depth camera positioned for robotics and industrial automation, with the company stating that it delivers more than twice the depth quality of the previous generation. The launch, first reported by The Robot Report, is relevant beyond mobile robots and bin picking: for welding automation, better depth data can directly affect part localization, seam finding, torch approach, and post-weld quality checks. According to Business Wire, the D585 Pro is powered by the new RealSense Vision Processor V5 and combines depth sensing, edge AI acceleration, and a software-defined architecture. RealSense also describes the product as part of a broader push toward “AI-native vision” for robots on its official site, where the D585 is presented alongside Perception Studio for physical AI workflows, as noted by RealSense.
For industrial users, the significance is less about headline AI terminology and more about whether a camera can maintain stable, repeatable depth data under factory conditions. Welding environments are difficult for vision systems because they combine reflective metal surfaces, variable part geometries, smoke, spatter, and changing ambient light. A camera claiming higher depth quality and broader operating coverage may therefore be useful in upstream and downstream tasks around the weld itself, even if it is not mounted directly in the arc zone. In robotic cells built around ABB, KUKA, FANUC, Yaskawa, Universal Robots, or Doosan platforms, 3D vision is increasingly used for part presence verification, fixture tolerance compensation, robot guidance, and dimensional inspection. The D585 Pro’s value proposition appears to be that one camera platform can cover close-range precision and longer-range perception at higher frame rates, potentially reducing the need to mix multiple sensors in a single cell architecture.
Higher-quality depth data for industrial robotics
The technical claim attracting most attention is the reported improvement in depth quality over earlier RealSense models. In practical manufacturing terms, that can mean denser point clouds, fewer invalid pixels, and more stable edge definition on complex metal parts. Those factors matter when robots need to identify flange positions, detect gaps, or verify whether a component is seated correctly before a welding cycle starts. Business Wire states that the D585 Pro is intended to span the robotics and industrial vision stack with close-range precision, long-range coverage, high frame rate, and indoor/outdoor performance. If those claims hold in deployment, the camera could fit applications such as pallet-to-fixture loading, pre-weld part alignment, and end-of-line inspection where a single sensing platform simplifies integration.
There is also a broader trend behind this launch. Vision suppliers are moving processing closer to the sensor, using dedicated system-on-chip designs to reduce latency and offload perception tasks from the robot controller or industrial PC. That approach aligns with the needs of modern cells where machine vision, AI inference, and robot motion planning increasingly interact in real time. For welding automation, however, integrators will still need to validate how any depth camera behaves around arc flash, hot surfaces, and metallic reflectivity. Compliance with the wider machine safety framework remains separate from camera performance itself, so deployment in Europe still has to be assessed within the context of ISO 10218 for industrial robots, ISO/TS 15066 for collaborative applications, and relevant IEC and EN electrical and machinery requirements, including the functional safety expectations commonly applied in cell design.
Why vision quality matters in welding automation
Automated welding cells often depend on a chain of perception steps before the torch is ever ignited. A part may arrive with dimensional variation from cutting, stamping, or tack assembly; fixtures may allow limited movement; and mixed-model production can require the robot to identify which component version is present. In these scenarios, depth cameras support localization and verification tasks that reduce scrap and unplanned stops. They can also complement laser seam tracking or 2D cameras rather than replace them. For example, a 3D depth sensor may confirm part pose and gap condition before welding, while a dedicated seam sensor handles final path correction at the joint. Better depth quality can improve the reliability of that first stage, especially in high-mix, low-volume production where hard tooling alone is not enough.
This is particularly relevant for SMEs adopting cobot welding. Collaborative systems from Universal Robots or Doosan are often selected for flexibility, but that flexibility depends on perception when operators switch between part families or when fixtures are simplified to reduce cost. A more capable depth camera can support faster changeovers and more repeatable setup validation. In larger automotive or Tier-1 environments using ABB, FANUC, KUKA, or Yaskawa robots, the same principle applies at higher throughput: if vision reduces misloads, improves traceability, or enables automated quality gates, it contributes to overall equipment effectiveness. The challenge is always integration discipline—camera placement, shielding, calibration strategy, network architecture, and software interfaces determine whether theoretical sensor performance translates into stable production results.
What this means for welding cell integrators
For welding cell integrators, the D585 Pro is best viewed as another option in the growing toolkit for 3D perception rather than as a universal replacement for established weld sensing technologies. Its strongest use cases are likely to be robotic welding cell design tasks around part detection, bin-to-fixture transfer, pre-weld verification, and post-process inspection, especially where integrators want to consolidate sensing and edge processing. In cobot welding cells, a compact AI-native depth camera may help simplify deployment where floor space, controller capacity, and engineering time are constrained. In larger turnkey systems, it could support digital twin updates, adaptive fixturing logic, or automated quality documentation. Integrators should still benchmark it against application-specific requirements such as minimum feature size, cycle time, tolerance stack-up, ingress protection, and resistance to contamination. They should also verify interoperability with PLCs, industrial PCs, and robot ecosystems from ABB, KUKA, FANUC, Yaskawa, Universal Robots, and Doosan, as well as cybersecurity and software maintenance expectations over the cell lifecycle.
The broader takeaway is that depth vision is becoming more central to welding automation as manufacturers push for higher mix, lower scrap, and more traceable quality control. A camera that improves depth fidelity can have measurable downstream effects if it reduces false detections, improves robot guidance, or catches setup errors before welding begins. For manufacturers evaluating new robotic welding or cobot welding projects, this type of sensor development is worth tracking alongside power source, torch cleaning, and safety technology choices.
Companies planning a new welding cell or upgrading an existing robotic welding line can request a quote to assess how 3D vision, seam tracking, and cell design options fit their production requirements.
Related articles
Request a quote
Looking for a specific configuration, or want to discuss our current stock? Tell us about your project — we reply within 24 hours from our Bilbao office.