Backup Power Becomes Critical for Robotic Welding Cells
Reliable backup power is moving from optional to essential in robotic welding and broader automation, as manufacturers seek to prevent downtime, protect equipment and enable safe shutdowns.
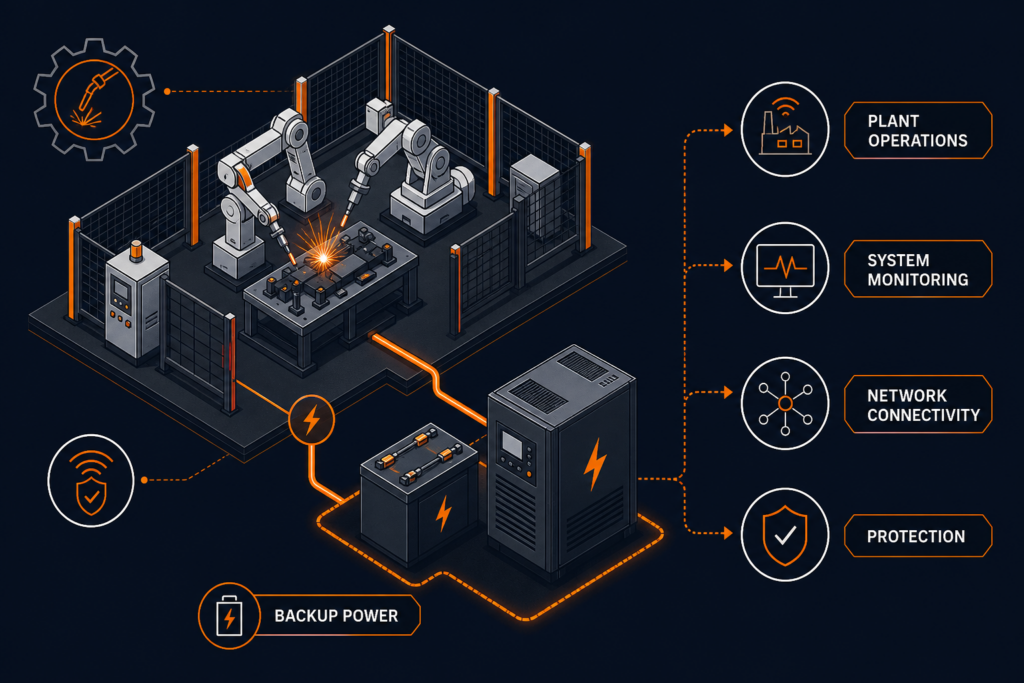
Reliable backup power is becoming a core design consideration for modern robotics systems, especially in production environments where unplanned stops can quickly translate into scrap, delayed deliveries and equipment risk. The original report from Robotics & Automation News highlights a broader industrial trend: as factories depend more heavily on robots, motion control, sensors and connected software, electrical continuity is no longer only a facilities issue. It becomes an automation engineering issue. In welding, this is particularly relevant because robotic cells combine robot controllers, welding power sources, wire feeders, safety PLCs, extraction systems, positioners and quality monitoring devices, all of which can react differently to voltage dips, brownouts or full outages.
Power quality is now part of automation reliability
Manufacturers have long planned for mechanical failures and consumable wear, but power disturbances are increasingly treated as a production risk in their own right. According to a recent industry article from Electro-Motion, modern plants rely on robotics, CNC equipment and automated control systems that can be disrupted not only by complete outages but also by short interruptions and unstable supply conditions. For robotics, the consequence is not always a simple restart. A sudden loss of power can interrupt a weld path, corrupt process data, trigger fault states in servo systems, or leave a part clamped in an unsafe intermediate position. In high-mix fabrication and automotive Tier-1 production, even a brief event can create traceability gaps and force manual intervention before the cell returns to automatic mode.
This is why uninterruptible power supplies, ride-through capability and selective power segmentation are receiving more attention in automation projects. A UPS does not necessarily need to keep the entire welding process running for an extended period; in many cases, its main value is to maintain stable power long enough for the robot and control architecture to complete a controlled stop, preserve program states and protect communication between PLCs, HMIs and industrial networks. The wider automation sector has been making the same point. GVE notes that redundant power supply systems and UPS architectures are increasingly integrated to preserve sensitive processes and data during disturbances. For robot cells, that principle applies directly to controller memory, safety logic, weld schedules and production records.
Why welding applications are especially exposed
Robotic welding cells are more sensitive to power instability than some other automated stations because they combine motion control with an energy-intensive joining process. Arc welding cells using ABB, KUKA, FANUC or Yaskawa robots typically integrate separate welding power sources, torch cleaning stations, seam tracking, fixtures and often rotating positioners. Cobot welding systems based on Universal Robots or Doosan platforms may be mechanically simpler, but they still depend on stable power for repeatable motion, process consistency and safe operator interaction. If the robot controller remains live while the welding source drops out, or vice versa, the cell can enter a fault condition that requires a structured recovery sequence. That recovery time is often more expensive than the outage itself.
There is also a quality dimension. A power event during a weld can produce incomplete fusion, crater defects, arc instability or interrupted shielding gas timing, depending on the process and material. For sectors with strict validation requirements, such as automotive structures, agricultural machinery or pressure-related fabrications, those defects may trigger rework, destructive testing or part quarantine. Integrators therefore increasingly assess which loads need backup and which should fail safely. Typical priorities include robot controllers, safety PLCs, industrial PCs, network switches, HMI panels and data logging systems, while high-load welding power sources may be handled through controlled shutdown logic rather than full UPS support. This approach aligns with practical retrofit thinking seen elsewhere in welding automation, where suppliers such as Smooth Robotics emphasize compatibility with existing welding power sources rather than replacing all upstream equipment at once.
Standards, safety and system architecture
Backup power for robotics is not only about uptime; it also intersects with compliance and functional safety. Welding cell designers in Europe typically work within the framework of the Machinery Directive transition to the Machinery Regulation, while applying standards such as ISO 10218 for industrial robot safety, ISO 13849 for safety-related control systems, IEC 60204-1 for electrical equipment of machines, and relevant EN harmonized versions. Where collaborative welding is used, ISO/TS 15066 may also shape risk assessment. None of these standards simply mandate a UPS for every robot cell, but they do require predictable behavior under fault conditions, safe stopping functions and sound electrical design. Backup power can support that objective by ensuring that safety circuits, controlled stop routines and fault logging remain available during a disturbance.
For integrators, the engineering question is therefore architectural: what must stay energized, for how long, and to achieve which outcome? In some cells, a few minutes of autonomy for the control layer is enough. In others, especially where there are coordinated external axes, heavy positioners or automated part transfer, a more robust strategy may be justified. The answer depends on process criticality, restart complexity, utility reliability and customer KPIs such as OEE. It also depends on vendor-specific behavior. Robot platforms from ABB, KUKA, FANUC and Yaskawa each have different controller ecosystems and shutdown diagnostics, while cobot platforms from Universal Robots and Doosan may present different integration patterns around external welding packages, safety scanners and compact control cabinets.
What this means for welding cell integrators
For welding cell integrators, backup power is moving from an optional electrical accessory to an early-stage design parameter. During concept development, it now makes sense to map the cell into power domains: motion control, welding process equipment, safety, IT/networking and auxiliary devices. That makes it easier to define whether the objective is process continuation, controlled stop, data retention or rapid restart. It also helps procurement teams compare the cost of UPS hardware, battery maintenance and cabinet space against the cost of lost production and recovery labor. The business case is often strongest in robotic MIG/MAG and TIG cells running unattended shifts, as well as in cobot welding stations where operators expect quick restart and minimal troubleshooting after a disturbance.
As more manufacturers automate welding to improve consistency and throughput, the resilience of the electrical architecture becomes part of overall cell performance. Industry commentary from FANUC has already underlined how robotic and cobot welding are being adopted for quality and efficiency gains; protecting those gains means reducing vulnerability to power events as well. For buyers specifying new cells or retrofits, the practical next step is to ask not only about robot reach, torch package and cycle time, but also about power conditioning, shutdown behavior and restart strategy. Companies evaluating a new robotic welding cell or cobot welding project can request a quote to review backup power options, risk scenarios and electrical design choices alongside the core welding automation scope.
Related articles
Request a quote
Looking for a specific configuration, or want to discuss our current stock? Tell us about your project — we reply within 24 hours from our Bilbao office.