PSYONIC and ABB Push Cobot Dexterity Toward Industrial Use
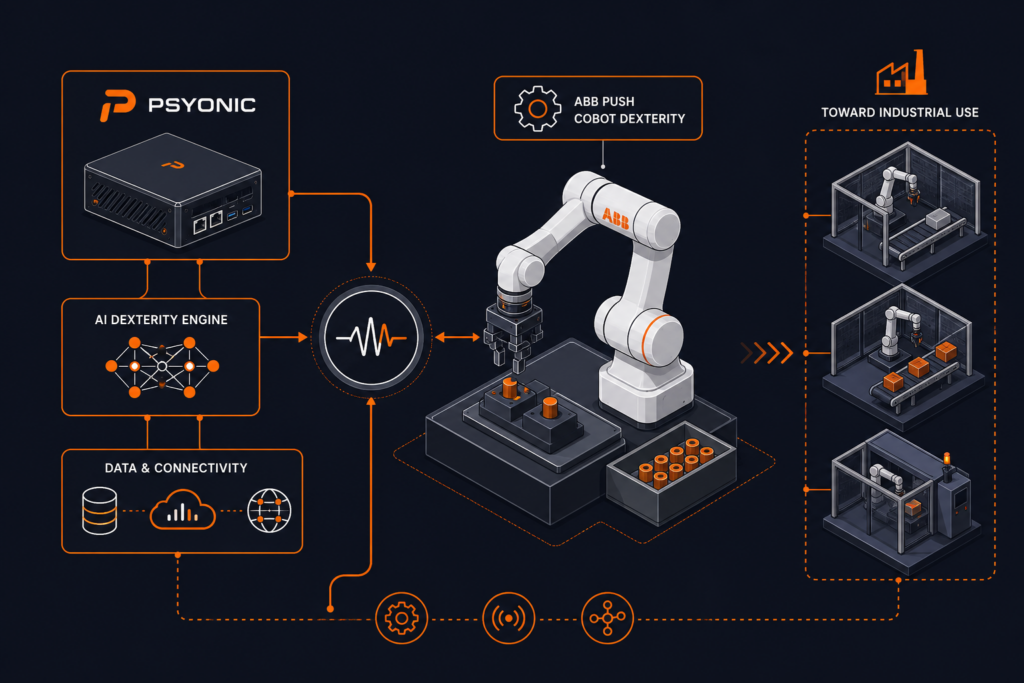
PSYONIC is integrating its touch-enabled Ability Hand with ABB’s GoFa cobot to transfer human-generated grasping data into robotics, with implications for flexible automation and welding cells.
PSYONIC and ABB test touch-enabled robotic manipulation
PSYONIC has partnered with ABB Robotics to combine the company’s Ability Hand with ABB’s GoFa collaborative robot, aiming to transfer human-generated touch and grasping data into robotic manipulation. Reported first by The Robot Report, the project links prosthetics-derived sensing and control with industrial cobot hardware. The stated objective is not simply to build a more capable gripper, but to use data from real users of PSYONIC’s bionic hand to improve how robots understand contact, pressure, and object handling. For manufacturing stakeholders, that makes the announcement relevant beyond medical robotics, because dexterous end effectors remain one of the limiting factors in flexible automation for high-mix production.
PSYONIC’s Ability Hand is known for touch feedback and multi-finger actuation, originally developed to restore dexterity for prosthetics users. According to coverage and related company material referenced in FinanzNachrichten, ABB Robotics’ R&D team is working with PSYONIC on integration and development to explore how touch-enabled manipulation can support next-generation autonomous robotics applications. ABB’s own collaborative robot portfolio positions GoFa as a platform for safe and flexible human-robot collaboration, with payload and reach characteristics suited to assembly, handling, and machine tending tasks, as outlined by ABB. The technical significance lies in combining compliant cobot motion with richer end-of-arm sensing, which could improve object acquisition, part presentation, and adaptive handling where conventional two-jaw grippers or fixed tooling are too restrictive.
Why dexterity matters in industrial automation
Industrial robotics has long been strong in repeatability, payload handling, and path control, but less capable when tasks involve uncertain geometry, variable part fit-up, or delicate contact. That gap is especially visible in sectors such as electronics, medical devices, metal fabrication, and automotive subassembly, where robots increasingly need to manipulate mixed components rather than only execute fixed trajectories. A touch-enabled robotic hand could help a cobot detect whether a part is seated correctly, whether a fixture has shifted, or whether an object is slipping during transfer. In practical terms, this may reduce dependence on highly dedicated tooling and allow more adaptive cells in environments where product variants change frequently.
For production engineers, the broader context is that major robot vendors are all moving toward more flexible automation architectures. ABB, KUKA, FANUC, Yaskawa, Universal Robots, and Doosan each offer collaborative or lightweight platforms intended for easier deployment in mixed human-machine environments. However, the end effector often remains the bottleneck. Vision systems can identify objects, and force-torque sensors can monitor contact at the wrist, but finger-level tactile data is still relatively uncommon in mainstream industrial cells. If PSYONIC and ABB can make touch data reliable enough for production use, the result could be a new class of manipulation applications where robots handle irregular parts, compensate for tolerance variation, or perform semi-structured tasks with less fixturing. That said, moving from demonstration to factory deployment will require validation for cycle time, contamination resistance, maintenance intervals, and software integration with PLC, safety, and quality systems.
What this means for welding cell integrators
For robotic welding and cobot welding integrators, the immediate relevance is not that a five-finger robotic hand will replace a welding torch, but that dexterous manipulation can improve upstream and downstream operations around the weld process. Welding cells frequently depend on manual loading, tack positioning, part orientation, and post-weld handling because these steps are less predictable than the weld path itself. A more dexterous cobot-mounted manipulator could support flexible loading of small batches, handling of cut parts with variable edge condition, or adaptive presentation of components to fixtures before arc welding begins. In collaborative welding environments, this may be particularly useful for low-volume fabrication, contract manufacturing, and SME workshops where dedicated hard automation is difficult to justify.
There are also implications for cell design and compliance. Integrators considering advanced end effectors on cobots such as ABB GoFa, or comparable platforms from Universal Robots and Doosan, will still need to assess the complete application under relevant machinery and robot safety frameworks, including ISO 10218 for industrial robot safety, ISO/TS 15066 for collaborative operation, and broader machinery requirements under IEC and EN harmonized standards. In welding applications, additional process-specific controls remain essential, including arc flash protection, fume extraction, torch collision management, and safe separation between operators and moving equipment. A dexterous hand may improve handling flexibility, but it does not remove the need for robust fixture strategy, weld quality monitoring, or validated safety functions. Integrators will need to determine where tactile manipulation adds measurable value: loading, regrip, inspection support, or hybrid human-robot workflows around the welding envelope.
From prosthetics data to factory-floor deployment
The most interesting aspect of the ABB-PSYONIC collaboration is the use of human-generated data rather than purely synthetic robotic training. Prosthetics users interact with objects in ways that naturally encode grip adaptation, pressure modulation, and recovery from slip. If that data can be translated into industrially useful control models, it may help robots become less brittle in real-world handling tasks. For manufacturers, the likely near-term outcome is not fully autonomous dexterous assembly, but incremental gains in manipulation reliability for flexible automation cells. That could benefit welding-adjacent operations such as kitting, part feeding, fixture loading, and finished-part transfer, where variability often drives labor content.
The development should therefore be watched as part of a wider trend: robots are becoming easier to deploy mechanically, but the next productivity gains will come from better sensing, more adaptive software, and end effectors that can cope with variation. For companies planning new welding cells or retrofits, this is a reminder to evaluate not only robot brand and power source, but also gripper strategy, sensor stack, and future extensibility.
Manufacturers and integrators assessing robotic welding cells, cobot welding stations, or flexible part-handling automation can request a quote to review how dexterous manipulation, fixturing, and safety architecture may fit a specific production case.
Related articles
Request a quote
Looking for a specific configuration, or want to discuss our current stock? Tell us about your project — we reply within 24 hours from our Bilbao office.