E-Waste Rules Open New Space for Robotic Chip Recovery
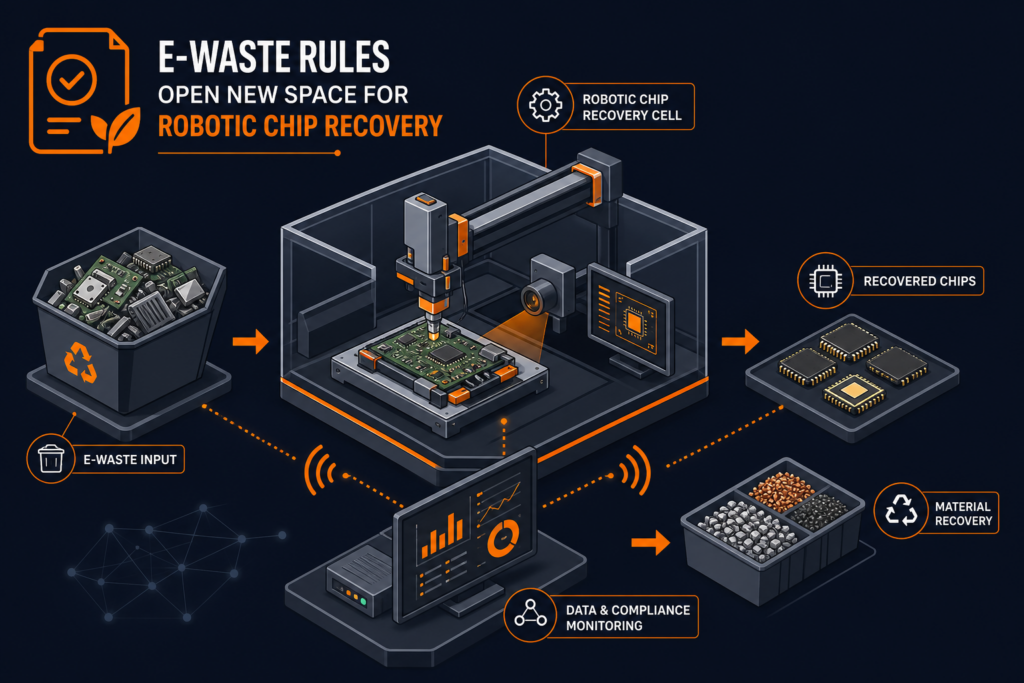
Tighter e-waste rules and supply-chain pressure are creating a new use case for robotics: recovering reusable legacy chips before shredding, with implications for industrial automation.
Regulation and supply-chain pressure are reshaping e-waste processing
Electronic waste is moving from a downstream recycling issue to an upstream industrial automation opportunity. The trigger is a combination of tighter regulation, higher scrutiny on waste exports, and renewed concern about component availability for long-life equipment. According to the 2024 Global E-Waste Monitor, the world is on track to generate 82 million tonnes of e-waste annually by 2030, while less than a third of the recoverable metal value is currently captured. Against that backdrop, the article originally reported by IEEE Spectrum Robotics highlights a shift in thinking: instead of shredding printed circuit boards first and sorting mixed material later, robotics developers are trying to identify and remove valuable components before destructive processing begins. This matters because boards contain not only copper, aluminium and precious metals, but also reusable integrated circuits, magnets and capacitors that may retain functional value if extracted intact.
The policy context is becoming more relevant for automation buyers. New waste-shipment rules in Europe, expanded recycling fees linked to non-removable batteries in California, and import restrictions in markets such as Malaysia all increase pressure to process more value domestically and with better traceability. That aligns with broader circular-economy initiatives in manufacturing and electronics. Schneider Electric, for example, has described how integrated robotics can support semiconductor reuse by combining machine vision, controlled desoldering and automated handling to extend chip life and reduce waste, as outlined by Schneider Electric Blog. For industrial users, the significance is less about consumer recycling headlines and more about whether robotic disassembly can create stable, auditable recovery flows for parts and materials that conventional shredding destroys.
Tuurny’s approach targets selective recovery rather than bulk recycling
San Francisco startup Tuurny is one of the companies testing that model. Its Nantul system is designed to identify and extract RAM integrated circuits from discarded boards, with a stated throughput of 300 intact RAM ICs per hour. The company says it is preparing a first field deployment in early 2027 through a six-figure deal with UK television recycler Areera, which reportedly processes 1,500 tonnes of televisions per month. Additional reporting from Newsfile describes the platform as an AI-based system intended to identify, harvest and database valuable components before boards enter conventional recycling streams.
Technically, the concept is closer to robotic disassembly than to standard recycling automation. Tuurny combines a feeding arm with two compact workstations that resemble CNC or benchtop motion systems. A neural-network vision layer identifies components and links them to thermal profiles, after which the machine uses localised heating, suction and robotic motion control to remove chips while attempting to avoid thermal or mechanical damage. The first commercial target is legacy RAM and related chips used in systems where replacement parts are increasingly difficult to source. That focus is pragmatic. Legacy semiconductors in telecom, aerospace, defence and industrial controls often remain in service long after mainstream production ends, so recovered components can have a higher value than mixed scrap. The challenge is that extraction quality, traceability and downstream testing must all be good enough to support resale or reuse.
Commercial viability depends on repeatability, standards and integration
For automation engineers, the key question is not whether a robot can desolder a chip once, but whether it can do so repeatedly across variable, contaminated and partially damaged boards at an acceptable cost per recovered part. Used electronics differ in solder condition, board layout, markings, contamination and prior repair history. That creates a demanding perception-and-manipulation problem involving component recognition, path planning, local heat control and gentle pick-and-place. The same engineering logic is familiar in robotic welding cells, where process stability depends on managing part variation, thermal input, fixture repeatability and quality verification. In e-waste disassembly, however, the tolerance for damage is even tighter because the objective is preservation, not joining.
Industrial robot and cobot suppliers already offer building blocks that could support this category of cell design. ABB, KUKA, FANUC and Yaskawa provide articulated robots, machine vision interfaces and compact controller architectures suitable for high-repeatability handling tasks. Universal Robots and Doosan are relevant where lower payloads, collaborative access and modular deployment are priorities, although true collaborative operation still depends on risk assessment and safeguarding architecture. Integrators considering such systems would need to map them against machinery and robot safety requirements including ISO 10218 for industrial robots, ISO/TS 15066 for collaborative applications, and broader machinery risk-assessment frameworks under ISO 12100. Depending on heater design, electrical integration and enclosure architecture, compliance with relevant IEC and EN standards for electrical safety, control panels, guarding and fume extraction would also be necessary. As with welding cells, the commercial case will depend on cycle time, uptime, consumables, maintenance intervals, traceability software and the value of the recovered output stream.
What this means for welding cell integrators
For welding cell builders and robotic integrators, the immediate takeaway is not that e-waste processing will replace arc welding projects, but that adjacent markets are emerging where the same system-integration disciplines apply. A robotic chip-recovery cell still requires fixture strategy, thermal process control, machine vision, end-of-arm tooling selection, safe material flow and data capture. Integrators experienced in robotic welding or cobot welding already understand how to engineer around heat input, process windows, smoke extraction, guarding, PLC coordination and quality monitoring. Those capabilities can transfer into selective disassembly cells, especially for SMEs seeking compact, modular automation rather than large centralised recycling lines. The opportunity may be strongest for special-machine builders that can combine robot programming with vision, thermal tooling and traceability into a turnkey enclosure.
The wider implication is that regulation is creating new automation demand in sectors that were previously dominated by manual labour or low-value bulk processing. If selective recovery of RAM, processors or other components proves reliable at scale, integrators may see demand for hybrid cells that combine feeding, identification, extraction, sorting and test routing. That would favour suppliers able to design flexible cells around standard robot platforms while meeting the documentation and compliance expectations of industrial recyclers and OEM supply chains. Companies evaluating whether similar engineering principles could be applied to robotic welding cells, cobot welding stations or other thermal-process automation projects can request a quote to discuss cell architecture, safety requirements and integration options.
Related articles
Request a quote
Looking for a specific configuration, or want to discuss our current stock? Tell us about your project — we reply within 24 hours from our Bilbao office.